Power Generation
Hydroelectric Power Plant
Energy Flow
\(\boxed{\begin{matrix}\boxed{\text{Potential Energy}\to\text{Kinetic Energy}}\to \boxed{\text{Mech. Energy}}\to\boxed{\text{Elec. Energy}}\\ \text{overall efficiency}=\text{turbine efficiency}\times\text{generator efficiency}\end{matrix}}\)Water Path
\(\text{River Runoff}\to\text{Reservoir}\to\text{Forebay}\to\text{Trash Rack}\to\text{Penstock (with attached Surge Tank)}\to\\ \text{Main Inlet Valve}\to\text{Wicket Gates or Nozzle}\to\text{Turbine}\to\text{Draft Tube}\to\text{Tail Race}\)- Water Power Equation: \(P=\eta\rho QgH ,\quad \rho=1000kg/m^3 ,\quad g=9.814m/s^2 ,\quad \text{Q (m^3/s)} ,\quad \text{H (m)}\)
Coal-Thermal Power Plant
\(\begin{array}{l c l} \text{Energy Flow}&:&\boxed{\begin{matrix}\boxed{\text{Chemical}}\to\boxed{\text{Thermal}}\to\boxed{\text{Mechanical}}\to\boxed{\text{Electrical}}\\ \text{Overall Efficiency}=\text{Thermal Efficiency}\times\text{Turbine Efficiency}\times\text{Generator Efficiency}\end{matrix}}\\ \text{Coal Path}&:&\text{Mine}\to\text{Coal Storage}\to\text{Coal Handling}\to\text{Furnace}\to\text{Ash Handling}\to\text{Ash Storage}\\ \text{Air Path}&:&\text{Atmosphere}\to\text{Forced Draught Fan}\to\text{Air Preheater}\to\text{Furnace}\to\text{Superheater}\to\text{Economizer}\to\\ & &\text{Air Preheater}\to\text{Electrostatic Precepitator}\to\text{Induced Draught Fan}\to\text{Chimney}\to\text{Atmosphere}\\ \text{Feed Water Path}&:&\text{Reservoir}\to\text{Feedwater Treatment}\to\text{Feedwater Heater}\to\text{Economizer}\to\text{Boiler}\to\\ & &\text{Superheater}\to\text{High Pressure Turbine}\to\text{Reheater}\to\text{Low Pressure Turbine}\to\text{Condenser}\to\\ & &\text{Hotwell}\to\text{Condensate Extraction Pump}\to\text{Feedwater Heater}\\ \text{Cooling Water Path}&:&\text{Reservoir}\to\text{Condenser}\to\text{Cooling Tower}\to\text{Reservoir}\\ \end{array}\)Thermo-Nuclear Power Plant
\(\begin{array}{l c l} \text{Energy Flow}&:&\text{Nuclear Fission: mass to energy conversion}\to\text{thermal energy}\to\text{Heat Exchanger}\to \text{mechanical enrgy}\to\text{electrical energy}\\ \text{Nuclear Reactor}&:&\text{fast moving neutron}\to\text{collides with fuel atom}\to\text{knockedoff neutrons}\to\text{further collisions}\to\\ & &\text{Reflector (to bounce back the escaping neutrons into reactor core)}to\\ & &\text{Moderator (to slow down fast moving neutrons so that they are not absorbed by the fuel rods)}to\\ & &\text{Control Rods (to absorb excess neutrons)}\Rightarrow\text{multiplication factor, }k=\displaystyle \frac{\text{no. or neutrons generated in one generation}}{\text{no. or neutrons generated in preceeding generation}} \begin{cases}k < 1& \text{subcritical (power down)}\\k=1& \text{critical (stable power)}\\ k > 1& \text{super critical (power up)}\end{cases}\\ & &\text{Controlled Chain Reaction}\Rightarrow K >\text{ 1 is controlled to the required level to stabilize at the new level}\\ & &\text{Coolant (to absorb the heat of fission and transfer it to the working fluid in the heat exchanger)}\\ \text{Fuel Rods}&:& UO_2\text{pellets claded with Al or steel or zirconium, PLutonium, Thorium, MOX-Mixed Oxides (Uranium+Plutonium)}\\ \text{Reflector}&:&\text{Graphite, Beryllium, Steel, Lead}\\ \text{Moderator}&:&\text{Light Water, }H_2O, \text{Heavy Water, }D_2O, \text{Graphite}\\ \text{Control Rods}&:&\text{Boron-Carbide, Silver-Indium-Cadmium, Hafnium, Gadolinium and Dysprosium Titanate}\\ \text{Coolant}&:&\textbf{Gaseous: }\text{Air, }He, H_2, CO_2\\ & &\textbf{Liquid: }H_2O, D_2O\\ & &\textbf{Liquid-Metallic: }\text{Sodium, Lithium}\\ \text{Thermal-Shielding}&:&\text{Stainless Steel, Reflective Insulation, Fibrous Insulation (mineral wool and fiberglass)}\\ \text{Radiation-Shielding}&:&\text{Concrete, Lead, Water, Steel}\\ \text{Types of Reactors}&:&\textbf{Boiling Water Reactor: }\text{water coolant and working fluid (No Heat Exchanger)}\\ & &\textbf{Pressurized Water Reactor: }\text{Water as coolant}\to\text{heat exchanger}\to\text{workling fluid}\\ & &\textbf{Gas Cooled Reactor: }\text{Gas as coolant}\to\text{heat exchanger}\to\text{workling fluid}\\ & &\textbf{CANDU Reactor: }D_2O\text{ as Moderator cum Coolant}\\ & &\textbf{Liquid-Metal Cooled Reactor: }\text{Na, Pb, Pb-Bi as Primary Coolant, NaK as Secondary Coolant}\\ & &\textbf{Fast Breeder Reactor: }\text{Na or K as Coolant, U or Pu as fuel, No Moderator}\\ \end{array}\)Gas-Turbine Power Plant
\(\begin{array}{l c l} \textbf{Simple Cycle}&:&\text{Brayton (Gas) cycle}\\ \textbf{Combined Cycle}&:&\text{Brayton (Gas) cycle and Rankine (Vapor) cycles}\\ \end{array}\)Diesel-Engine Power Plant
\(\begin{array}{l c l} \textbf{Two-Stroke (Diesel) Engine}&:&\text{Diesel (gas) cycle}\\ \textbf{Four-Stroke (Petrol) Engine}&:&\text{Otto (gas) cycle}\\ \end{array}\)Geothermal Power Plant
Thermo-Solar Power Plant
Solar-Photovoltaic Power Plant
Wind-Turbine Power Plant
- Horizontal Turbine Wind Power Plant
- Vertical Turbine Wind Power Plant
Tidel Power Plant
OTEC: Ocean Thermal Energy Conversion
MHD: Magneto Hydrodynamic Generator
Fuel Cells
Power Transmission
Mechanical Design of Transmission Lines
Type of Lines from Transmission to Distribution
\( \boxed{\begin{array}{c} \text{765kV or 400kV or 220kV or 132kV} \\ \text{Transmission Lines} \\ \text{(Designed on Power)} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{33kV or 11kV} \\ \text{Feeders} \\ \text{(Designed on Current)} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{415V 3Ph or 240V 1Ph} \\ \text{Distributors} \\ \text{(Designed on Drop)} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{1Ph or 3Ph} \\ \text{Service Mains} \\ \text{(Designed on Load)} \end{array}} \)OH Line Conductors
\(\begin{array}{l c l} \text{Solid Conductors} &:& \text{No Flexibility, More Skin Effect}\\ \text{Stranded Conductors} &:& \text{Less Tensile Strength}\\ \text{Composite Conductors} &:& \text{More Sag}\\ \text{Expanded Composite Conductors} &:& \text{More Corona}\\ \text{Hollow Conductors} &:& \text{More Reactance, Less Mechanical Strength}\\ \text{Bundle Conductors} &:& \text{Less Power Transmission Capacity}\\ \text{Double Circuit Lines} &:& \text{Less Reliability}\\ \text{Parallel Lines} &:& \text{Massive ROW} \rightarrow \text{Wireless Power Transmission}\\ \end{array}\)Stranded Conductors
\(\begin{array}{l c l} & & \\ \text{Naming an ACSR Conductor} &:& \left(\displaystyle\frac{x}{y}\right) \text{ ACSR} \Rightarrow \begin{array} \\ \text{max(x, y) : no. of Al strands} \\ \text{min(x, y) : no. of steel strands} \end{array} \\ & & \\ \text{No. of strands in each layer} &:& N = 3x^2 + 3x + 1 ,\quad \text{x = layer number} \\ & & \\ \text{Overall diameter of a stranded conductor} &:& D = (2n - 1)d ,\quad \text{n = total no. of layers} \\ & & \\ \end{array}\)OH Line Insulators
\(\begin{array}{l c l} \text{LT Through Line} &:& \text{Small Pin} \\ \text{LT Dead Ends} &:& \text{Shackle} \\ \text{11kV Through Line} &:& \text{Medium Pin} \\ \text{11kV Dead Ends} &:& \text{Medium Disc} \\ \text{33kV Through Line} &:& \text{Big Pin} \\ \text{33kV Dead Ends} &:& \text{Big Disc} \\ \text{EHT Through Line} &:& \text{Suspension Insulators} \\ \text{EHT Dead Ends} &:& \text{Strain Insulators} \\ \end{array}\)Sag
\(\begin{array}{l c l} & & \\ \text{Supports at Equal Heights} &:& S = \displaystyle\frac{wl^2}{8T}\\ & & \\ \text{Supports at Different Heights} &:& S_1 = \displaystyle\frac{wx_1^2}{2T},\quad S_2 = \displaystyle\frac{wx_2^2}{2T} ,\quad l = x_1 + x_2 \\ & & \\ \end{array}\)
Electrical Design of Transmission Lines
Voltage Levels
\(\begin{array}{l c l} \text{Low Tension} &:& \text{240V 1Ph & 415V 3Ph : Secondary Distribution (DISCOMs)}\\ \text{High Tension} &:& \text{11kV, 33kV : Primary Distribution (DISCOMs)}\\ \text{Extra High Tension} &:& \text{132kV, 220kV : Secondary Transmission (TRANSCO)}\\ \text{Modern Extra High Tension} &:& \text{440kV : Primary Transmission (TRANSCO - Power Grid)}\\ \text{Ultra High Tension} &:& \text{765kV : Primary Transmission (Power Grid)}\\ \end{array}\)Voltage Distribution Over a String of Suspension Insulators
\(\begin{array}{l c l} \text{Ratio of Shunt & Mutual Capacitances} &:& m = \displaystyle\frac{C_{\text{shunt or link to ground}}}{C_{\text{self or mutual or disc}}} < 1 \\ \text{Voltage Profile} &:& V_{conductor} > V_{1^{st}\,disc} > \cdots > V_{last\,disc} \\ \text{String Efficiency} &:& \eta=\displaystyle\frac{\text{total voltage on conductor}}{\text{n}\times\text{voltage across first disc}}\\ \text{Improving String Efficiency} &:& \text{to improve } \eta, \text{ m-value must be decreased} \\ &:& \text{static shielding cancels the effects of } C_{sh}, \text{ by injecting cancelling currents} \\ \end{array}\)Transmission Line Parameters (R, L, C, G)
Resistance
\( R_{AC} = 1.5 R_{DC} \)Inductance
\(\boxed{\begin{array}{l c l} \text{Internal Inductance} &:& L_{int} = \displaystyle\frac{\mu_0}{8\pi} H/m = 0.05 mH/km \\ \text{External Inductance} &:& L_{ext} = \displaystyle\frac{\mu_0}{2\pi}\ln(\frac{D}{r})H/m = 0.2\ln(\frac{D}{r})mH/km \\ \text{Total Inductance} &:& \begin{array}{l} L_{total} = L_{int} + L_{ext} = 0.2 \ln(\frac{Distance}{radius}) mH/km \\ \begin{array}{l c l} \text{Solid} &:& Distance = D ,\quad radius = r' = re^{-1/4} = 0.7788r \\ \text{Loop} &:& L = 0.4\ln(\frac{D}{GMR}) mH/km,\quad Distance = D ,\quad GMR=\sqrt[2]{r{'}_1 r{'}_2} \\ \text{Stranded} &:& Distance = D ,\quad radius = \sqrt[n^2]{\begin{array}{c}n \\ \prod \\ j = 1 \end{array} \begin{array}{c}n \\ \prod \\ i=1 \end{array}} D_{ij}\\ \text{3-Phase} &:& Distance=\sqrt[3]{D_{12}D_{23}D_{31}},\quad radius = \sqrt[3]{r{'}_1 r{'}_2 r{'}_3} \\ \text{Bundled} &:& Distance = \sqrt[mn]{\begin{array}{c}n \\ \prod \\ j=1' \end{array} \begin{array}{c}m \\ \prod \\ i = 1 \end{array}} D_{ij},\quad radius = \sqrt[n^2] {\begin{array}{c}n \\ \prod \\ j = 1 \end{array} \begin{array}{c}n \\ \prod \\ i=1 \end{array}} D_{ij}\\ &:& \text{When Distance between conductors is less mutual linkages cancels some of the self linkages and hence L reduces}\\ & & \text{When Distance is more mutual linkages are weak and hence self linkages are more as a result L increases}\\ \end{array} \end{array}\\ \end{array}}\)
Capacitance
\(\boxed{\begin{array}{l c l} \text{Capacitance (Per Phase) Formula} &:& C_{an} = \displaystyle\frac{2\pi\epsilon_\circ}{\ln(\frac{Distance}{radius})} F/m \\ & & \begin{array}{l c l} \text{Solid} &:& Distance = D ,\quad radius = r \\ \text{Stranded} &:& Distance = D ,\quad radius = \sqrt[n^2]{\begin{array}{c}n \\ \prod \\ j = 1 \end{array} \begin{array}{c}n \\ \prod \\ i=1 \end{array}} D_{ij}\\ \text{3-Phase} &:& Distance=\sqrt[3]{D_{12}D_{23}D_{31}},\quad radius = \sqrt[3]{r_1 r_2 r_3} \\ \text{Bundled} &:& Distance = \sqrt[mn]{\begin{array}{c}n \\ \prod \\ j=1' \end{array} \begin{array}{c}m \\ \prod \\ i = 1 \end{array}} D_{ij},\quad radius = \sqrt[n^2] {\begin{array}{c}n \\ \prod \\ j = 1 \end{array} \begin{array}{c}n \\ \prod \\ i=1 \end{array}} D_{ij}\\ \end{array} \\ \end{array}}\)- Conductance
Transmission Line Models
Basis of Model Classification
\(\begin{array}{|c|c|c|}\hline \begin{array}{c}\textbf{Electrical Length} \\ \theta = \displaystyle\frac{l}{\lambda} = \frac{l}{(v/f)} \Rightarrow \theta \propto lf \end{array} &\begin{array}{c}\textbf{Physical Length}\\\textbf{(at 50Hz frequency)}\end{array} &\textbf{Model Approximation}\\\hline lf < \text{4,000 kmps} & l < \text{80 km} & \text{short line} \\ \hline \text{4,000 kmps} < lf < \text{12,000 kmps} & \text{80 km} < l < \text{240 km} & \text{medium line} \\ \hline lf > \text{12,000 kmps} & l > \text{240 km} & \text{long line} \\ \hline \end{array}\)Short Line Model (lumped R, L - Exam Based Numerical Oriented : voltage drop and power loss problems)
\(\begin{array}{l} \begin{bmatrix} A & B \\ C & D \end{bmatrix}=\begin{bmatrix} 1 & Z \\ 0 & 1 \end{bmatrix} \approx \begin{bmatrix} 1 & X \\ 0 & 1 \end{bmatrix} \\ A=D \Rightarrow \text{Symmetric} ,\quad AD-BC=1 \Rightarrow \text{Reciprocal} \\ V_S = \sqrt{(V_R\cos(\pm\phi_R)+I_RR)^2+(V_R\sin(\pm\phi_R)+I_RX)^2} \text{ (assuming the load is very small)} \\ VR \approx \displaystyle\frac{I_RR\cos\phi_R \pm I_RX\sin\phi_R}{|V_R|} = R_{pu}\cos\phi_R \pm X_{pu}\sin\phi_R \\ VR = 0 \Rightarrow |V_S| = |V_R| ,\quad pf = \cos(\theta + \phi_R) = -\displaystyle\frac{I_RZ}{2|V_R|} \text{ (leading pf)} \\ (VR)_{max} \Rightarrow pf = \phi_R = \theta \text{ (lagging pf)} \\ \text{Sending End Power Factor} \Rightarrow \begin{array}{|c|c|}\hline \textbf{Angle Condition} & \textbf{Power Factor} \\ \hline \phi_{load} < \theta_{line} & \cos\phi_s < \cos\phi_R \\ \hline \theta_{line} = \phi_{load} & \cos\phi_s = \cos\phi_R \\ \hline \phi_{load} > \theta_{line} & \cos\phi_s > \cos\phi_R \\ \hline \end{array} \end{array}\)Medium Line Model (lumped R, L, C - Explains the Ferranti effect in the most Intuitive way)
End Condenser Model
Receiving End Condenser Model (\( Z_{RL} \text{ cascaded with } Y_{C} \))
\(\begin{array}{l} \begin{bmatrix} A & B \\ C & D \end{bmatrix} = \begin{bmatrix} 1 & Z \\ 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \\ Y & 1 \end{bmatrix} = \begin{bmatrix} 1+YZ & Z \\ Y & 1 \end{bmatrix} \\ A \neq D \Rightarrow \text{Not Symmetric} ,\quad AD-BC=1 \Rightarrow \text{Reciprocal} \\ \end{array}\)Sending End Condenser Model (\( Y_{C} \text{ cascaded with } Z_{RL} \))
\(\begin{array}{l} \begin{bmatrix} A & B \\ C & D \end{bmatrix} = \begin{bmatrix} 1 & 0 \\ Y & 1 \end{bmatrix} \begin{bmatrix} 1 & Z \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 1 & Z \\ Y & 1+YZ \end{bmatrix} \\ A \neq D \Rightarrow \text{Not Symmetric} ,\quad AD-BC=1 \Rightarrow \text{Reciprocal} \\ \end{array}\)
Nominal - T Model (Receiving End Condenser model cascaded with Sending End Condenser model)
\(\begin{array}{l} \begin{bmatrix} A & B \\ C & D \end{bmatrix} = \begin{bmatrix} 1 & \frac{Z}{2} \\ 0 & 1 \end{bmatrix} \boxed{\begin{bmatrix} 1 & 0 \\ \frac{Y}{2} & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \\ \frac{Y}{2} & 1 \end{bmatrix}} \begin{bmatrix} 1 & \frac{Z}{2} \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 1 & \frac{Z}{2} \\ 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \\ Y & 1 \end{bmatrix} \begin{bmatrix} 1 & \frac{Z}{2} \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 1+\frac{YZ}{2} & Z(1+\frac{YZ}{4}) \\ Y & 1+\frac{YZ}{2} \end{bmatrix} \\ A=D \Rightarrow \text{Symmetric} ,\quad AD-BC=1 \Rightarrow \text{Reciprocal} \\ \end{array}\)Nominal - \(\pi\) Model (Sending End Condenser model cascaded with Receiving End Condenser model)
\(\begin{array}{l} \begin{bmatrix} A & B \\ C & D \end{bmatrix} = \begin{bmatrix} 1 & \frac{Y}{2} \\ 0 & 1 \end{bmatrix} \boxed{\begin{bmatrix} 1 & 0 \\ \frac{Z}{2} & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \\ \frac{Z}{2} & 1 \end{bmatrix}} \begin{bmatrix} 1 & \frac{Y}{2} \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 1 & \frac{Y}{2} \\ 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 \\ Z & 1 \end{bmatrix} \begin{bmatrix} 1 & \frac{Y}{2} \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 1+\frac{YZ}{2} & Z \\ Y(1+\frac{YZ}{4}) & 1+\frac{YZ}{2} \end{bmatrix} \\ A=D \Rightarrow \text{Symmetric} ,\quad AD-BC=1 \Rightarrow \text{Reciprocal} \\ \end{array}\)
Long Line (distributed R, L, C, G) Model (used for understanding the transmission phenomenon)
\(\begin{array}{l} \begin{bmatrix} A & B \\ C & D \end{bmatrix} = \begin{bmatrix} \cosh (\gamma l) & Z_\circ \sinh (\gamma l) \\ \frac{\sinh (\gamma l)}{Z_\circ} & \cosh (\gamma l) \end{bmatrix} \\ A=D \Rightarrow \text{Symmetric} ,\quad AD-BC=1 \Rightarrow \text{Reciprocal} \\ \text{characteristic impedance, } Z_c = \sqrt{\frac{Z}{Y}} = \sqrt{\displaystyle\frac{R + j\omega L}{G + j\omega c}} \\ \text{surge impedance, } Z_s = \sqrt{\frac{L}{C}} \quad \begin{array}{l} \approx 500 \Omega \text{ for transformers} \\ \approx 400 \Omega \text{ for transmission lines} \\ \approx 40 \Omega \text{ for UG cables} \\ \end{array} \\ \text{line impedance is a lumped concept, and characteristic impedance is a distributed parameter concept}\\ \Rightarrow \text{line impedance is the opposition to the conduction current} \\ \Rightarrow \text{characteristic impedance is the opposition to the current wave}\\ \Rightarrow \text{surge impedance is the characteristic impedance defined for lossless line (high frequency assumption)} \\ \begin{array}{|c|c|c|c|c|c|}\hline \textbf{Load Impedance} & \textbf{Nature of Loading} & \textbf{Receiving End Voltage} & \textbf{Load Angle} & \textbf{Sending End Current} & \textbf{Sending End Power Factor} \\\hline Z_{load}(=R_L) < Z_S & \text{Line Loading} > SIL & |V_R|<|V_S| & \delta > \beta l & |I_S|<|I_R| & \cos\phi_S\text{ is lagging} \\\hline Z_{load} (=R_L) = Z_S & \text{Line Loading} = SIL & |V_R| = |V_S| & \delta = \beta l & |I_S| = |I_R| & \cos\phi_S = 1 \\\hline Z_{load}(=R_L) > Z_S & \text{Line Loading} < SIL & |V_R| > |V_S| & \delta < \beta l & |I_S| > |I_R| & \cos\phi_S \text{ is leading} \\\hline \end{array} \\ \text{No Load or Lightly loaded line} \Rightarrow Z_{load} (\to \infty) > Z_C \Rightarrow \text{Line is open circuited on the receiving end} \\ \text{New Loads are added in shunt} \Rightarrow Z_{load} < Z_C \Rightarrow \text{Line Loading} > SIL \\ \text{propagation constant, } \gamma = \sqrt{YZ} = \sqrt{(R + j\omega L)(G + j\omega C)} = \alpha+j\beta\\ \text{attenuation constant, } \alpha = \sqrt{RG} \text{ - for distortionless lines} \\ \text{phase constant, } \beta = \omega\sqrt{LC} \text{ - for lossless & distortionless lines} \\ \text{All Lossless lines are Distortionless but not all Distortionless lines are Lossless} \\ \text{velocity of propagation, }v=\sqrt{\frac{1}{LC}}=\sqrt{\frac{1}{\mu\epsilon}}\approx\sqrt{\frac{1}{\mu_0 \epsilon_0}} = \text{3 lakh kmps} \\ \text{For UG cables capacitive effects are dominant so the velocity of propagation is less than the speed of light because of } \epsilon_r \\ \begin{array}{|c|c|c|}\hline \textbf{Load on the receiving end} & \textbf{Nature of reflection} & \textbf{Justification} \\\hline Z_{load} = Z_c & \text{No Reflection} \Rightarrow \text{Flat/ Infinite Line} & \text{No Medium Change for the waves} \\\hline Z_{load} \neq Z_c & \text{Reflections are observed} & \text{waves experience a medium change} \\\hline \end{array}\\ \text{Lightning Surges are modelled as Impulse signals} \\ \text{Switching Surges are modelled as Step Signals} \\ V_{R} + V_{T} = V_{i} ,\quad I_{R} + I_{T} = I_{i} \\ \text{Reflection Coefficient, } \Gamma_R = \displaystyle\frac{\text{Reflected Wave}}{\text{Incident Wave}} \Rightarrow \Gamma_R(V) = \displaystyle\frac{V_R}{V_i} = \displaystyle\frac{Z_L - Z_C}{Z_L + Z_C} ,\quad \Gamma_R(I) = -\Gamma_R(V) \\ \text{Refraction (or) Transmission Coefficient, } \Gamma_T = \displaystyle\frac{\text{Transmitted Wave}}{\text{Incident Wave}} \\ \text{Relation between Reflection coefficient and Transmission coefficient: } 1 + \Gamma_R = \Gamma_T \\ \text{Standing Wave Ratio, SWR} = \displaystyle\frac{1 + |\Gamma_R|}{1 - |\Gamma_R|} \Rightarrow \Gamma_R = \displaystyle\frac{SWR - 1}{SWR + 1}\\ \begin{array}{|c|c|}\hline \textbf{Load Impedance} & \textbf{Boundary Phenomenon} \\\hline \text{Open Circuit} & \Gamma_R(V) = 1 ,\quad \Gamma_R(I) = 1 \\\hline \text{Short Circuit} & \Gamma_R(V) = -1 ,\quad \Gamma_R(I) = -1 \\\hline \end{array}\\ \text{Thevenin Equivalent: } V_{th} = 2V_{incident} ,\quad Z_{th} = Z_C \\ \end{array}\)Interconnection of Transmission Lines
- Cascaded Lines
- Parallel Lines
Effects on Transmission Lines
Skin Effect
\( \boxed{\text{i(t)}} \rightarrow \boxed{\phi(t)} \rightarrow \boxed{\text{emf}} \rightarrow \boxed{\begin{array}{c} \text{eddy currents around }\phi(t) \\ \text{oppose i(t) at the center} \\ \text{reinforce i(t) at the surface} \end{array}} \Rightarrow \boxed{\text{i(t) flows on skin}} \Rightarrow \boxed{\begin{array}{c}\text{effective resistance}\\ \text{of the conductor} \\ \text{increases} \end{array}} \)
.
Current Distribution: \( J = J_{max}e^{-d/\delta} \)
.
Skin Depth: \( \delta = \sqrt{\frac{2}{\omega \sigma \mu}} \)
.
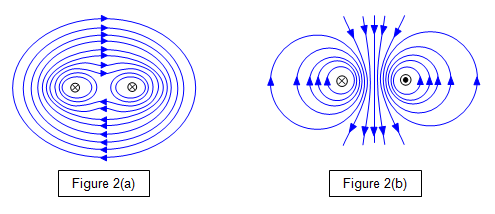
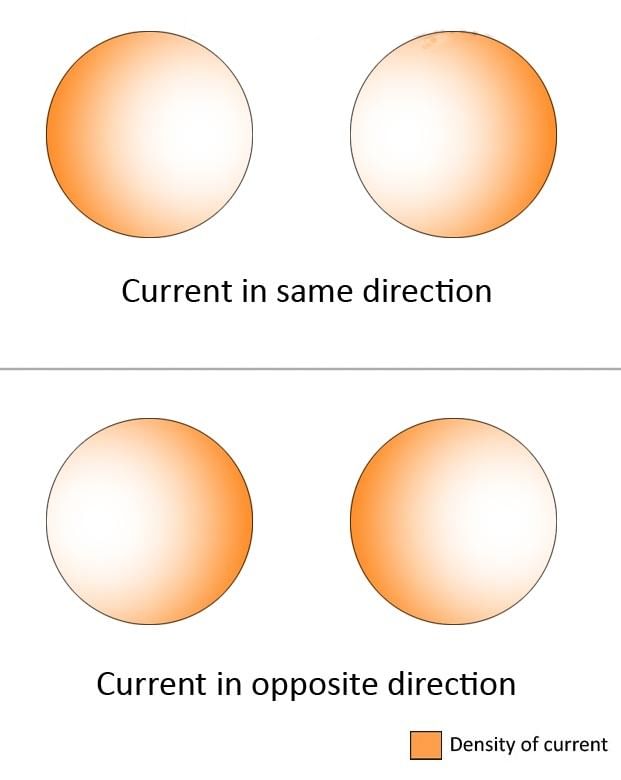
Proximity Effect
Corona
\(\begin{array}{l c l} \text{Critical Disruptive Voltage} &:& \text{Corona is initiated} \\ & & V_c = E_c r \ln\left(\displaystyle\frac{d}{r}\right) = m_\circ g_\circ \delta r \ln\left( \displaystyle\frac{d}{r} \right) \\ & & E_c = E_\circ \delta m \left( 1 + \displaystyle\frac{K}{\sqrt{\delta r}} \right) \\ & & \delta = \displaystyle\frac{p}{p_\circ} \frac{T_\circ}{T} \\ \text{Visual Critical Voltage} &:& \text{Corona is visible} \\ & & V_v = m_v g_\circ \delta r \left( 1 + \displaystyle\frac{0.301}{\sqrt\delta r} \right) \ln\left( \displaystyle\frac{d}{r} \right) = \displaystyle\frac{m_v}{m_\circ} \left( 1 + \displaystyle\frac{0.301}{\sqrt{\delta r}} \right) V_c \\ & & \delta = \displaystyle\frac{3.92 b}{273 + t^\circ C} \\ \text{Power Loss due to corona} &:& \text{Peek's Formula: } P_{corona} = \displaystyle\frac{242.2}{\delta} (f + 25) \sqrt{\displaystyle\frac{r}{d}} (V - V_c)^2 \times 10^{-5} kW/km/Ph \\ & & \text{Peterson's Formula: } P_{corona} = \displaystyle\frac{2.1 f V^2 F}{\left( \log_{10}(d/r) \right)^2} \times 10^{-9} kW/km/Ph \\ \end{array}\)Radio Interferance
\( \boxed{\begin{array}{c} \text{Unbalanced} \\ \text{Loading}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Unbalanced} \\ \text{Currents}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Incomplete} \\ \text{Field Cancellation}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Residual} \\ \text{Magnetic Field}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{EMF} \\ \text{Induced}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Radio} \\ \text{Interference}\end{array}} \)
.
\( \boxed{\begin{array}{c} \text{Unsymmetrical} \\ \text{Spacing}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{No} \\ \text{Transposition}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Unequal} \\ \text{Phase Inductances}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Incomplete} \\ \text{Field Cancellation}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Residual} \\ \text{Magnetic Field}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{EMF} \\ \text{Induced}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Radio} \\ \text{Interference}\end{array}} \)
.
\( \boxed{\begin{array}{c} \text{High} \\ \text{Voltage} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Strong} \\ \text{Field} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Air} \\ \text{Ionization} \end{array}} \rightarrow \boxed{\begin{array}{c}\text{Current Pulse}\\\text{(at each peak of 50 Hz)}\end{array}}\rightarrow \boxed{\begin{array}{c}\text{100 bursts}\\\text{per second} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Electromagnetic Noise} \\ \text{(Broadband)} \end{array}}\rightarrow \boxed{\begin{array}{c} \text{EMF} \\ \text{Induced}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Radio} \\ \text{Interference}\end{array}} \)
.
\( \boxed{\begin{array}{c} \text{Loose} \\ \text{Bolts} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Potential} \\ \text{Difference} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Dielectric} \\ \text{Breakdown} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Impulse} \\ \text{Current} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Impulse} \\ \text{Radiowave} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{EMF} \\ \text{Induced}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{Radio} \\ \text{Interference}\end{array}} \)Ferranti Effect
\(\begin{array}{l} |V_R| > |V_S| \\ 0 < \text{Short Line} < \text{Sending End C} < \text{T = } \pi < \text{Receiving End C} \end{array}\)Galloping
\( \boxed{\begin{array}{c} \text{Irregular conductor shape} \\ \text{+} \\ \text{Moderate to high winds} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{disrupted} \\ \text{smooth air flow} \\ \text{around the conductor} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{aerodynamic lift & drag forces} \\ \text{+} \\ \text{elasticity & weight of the conductor} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{twisting or torsional motion} \\ \text{+} \\ \text{vertical & horizontal movements} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{oscillations with} \\ \text{high amplitude (more than sag),} \\ \text{low frequency (0.1 to 3 hz) motion} \end{array}} \)
Aeolian Vibrations
\( \boxed{\begin{array}{c} \text{bare conductor} \\ \text{+} \\ \text{smooth wind} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{flow} \\ \text{separation} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{vacuum} \\ \text{effect} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{Vortex Street} \\ \boxed{\begin{array}{c c c} \boxed{\text{vortex growth on top}}&\rightarrow&\boxed{\text{vortex detach on top}}\\ \uparrow & & \downarrow \\ \boxed{\text{vortex growth on bottom}}&\leftarrow&\boxed{\text{vortex growth on bottom}}\\\end{array}}\end{array}} \rightarrow \boxed{\begin{array}{c} \text{creation of} \\ \text{alternating forces} \end{array}} \rightarrow \boxed{\begin{array}{c} \text{oscillations with} \\ \text{low amplitude (less than conductor dia),} \\ \text{high frequency (3 to 150 hz) motion} \end{array}} \)

Performance Indices of Transmission Lines
Voltage Regulation
\(\begin{array}{l} VR = \displaystyle\frac{|\frac{V_S}{A}| - |V_R|}{|V_R|} \times 100\% \\ \end{array}\)- Efficiency
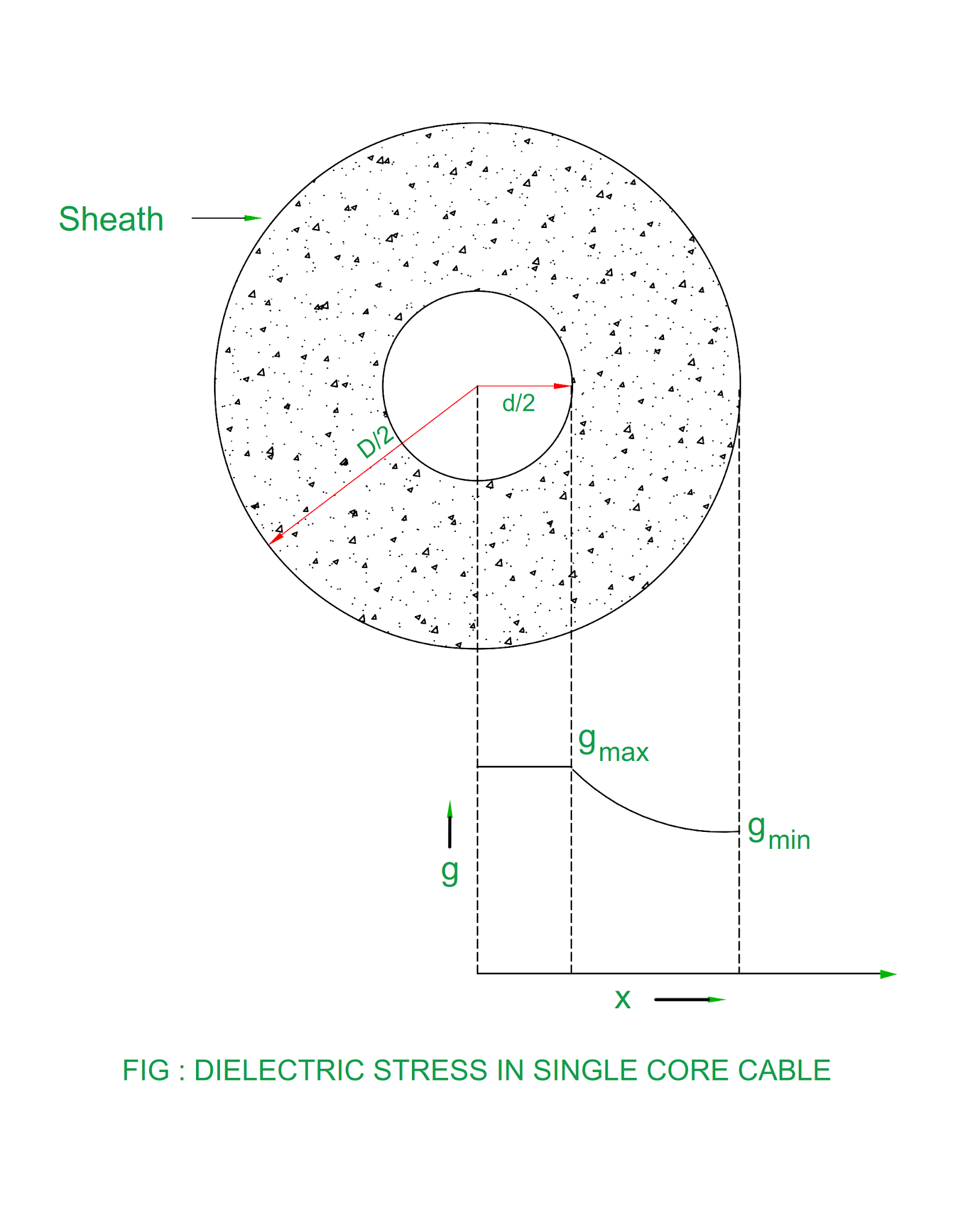
UG Cables
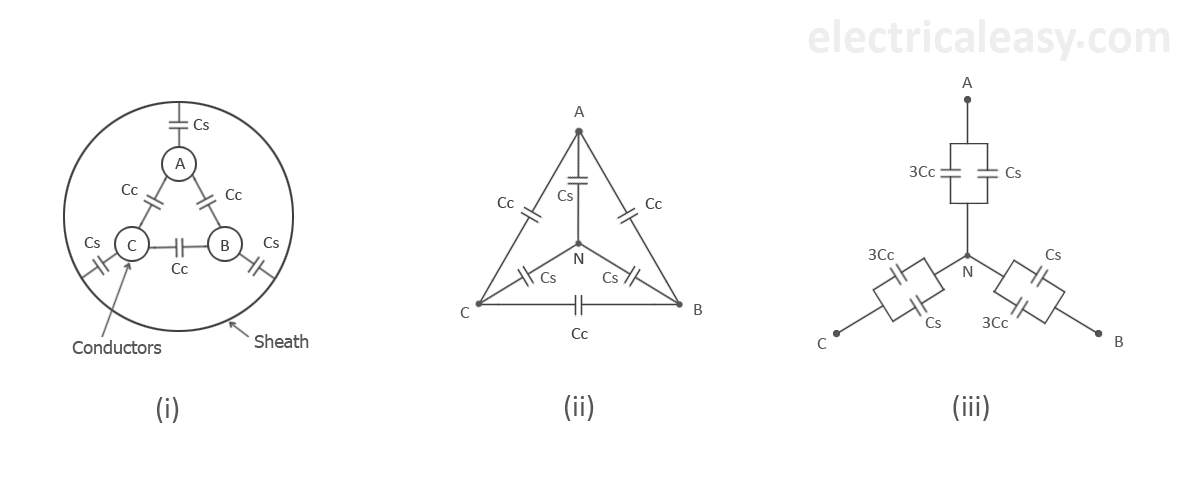
\(\begin{array}{l c l} \text{Layers} &:& \text{Clever Ingineers Shield Before Armoring Serves} \\ \text{Insulation Resistance} &:& R_{ins} = \rho_{ins}\displaystyle\frac{\ln{R/r}}{2\pi{l}} \\ \text{Insulation Grading} &:& \text{To equalize the Electric stress} \\ & & \text{Quality insulator (high } E_{max}\epsilon_r \text{ near conductor} \\ \text{Cable Capacitance} &:& C_{\text{1 core}} = \displaystyle\frac{2\pi\epsilon}{\ln{(R/r)}} \\ & & C_{\text{3 core}} = C_{ph} = C_{cs} + 3C_{cc} \\ & & \text{2 cores shorted with sheath: } C_{1, cs} = C_{cs} + 2C_{cc} \\ & & \text{3 cores mutually shorted: } C_{2, cs} = 3C_{cs} \\ & & \Rightarrow C_{cs}=\displaystyle\frac{C_2}{3} ,\quad C_{cc}=\displaystyle\frac{C_1}{2} - \displaystyle\frac{C_2}{6} \\ & & \text{1 core shorted with sheath: } C_{3, cc} = C_{cc} + \displaystyle\frac{C_{cc} + C_{cs}}{2} = \displaystyle\frac{C_{ph}}{2} \Rightarrow C_{ph} = 2C_{3, cc} \\ \text{Dielectric Loss} &:& P_{loss, ph} = \omega C_{ph} V_{ph}^2 \tan\delta \\ \end{array}\)

HVDC
\(\begin{array}{l c l} \textbf{Monopolar Link} &:& \text{1 -ve conductor, +ve is grounded} \\ \textbf{Bipolar Link} &:& \text{2 conductors +ve and -ve, neutral is grounded} \\ \textbf{Homopolar Link} &:& \text{2 conductors -ve and +ve is grounded} \\ \end{array}\)Bus-Admittance [\(Y_{bus}\)] Matrix
- Current Equation: \([I_{bus}]=[Y_{bus}][V_{bus}]\)
- Voltage Equation: \([V_{bus}]=[Z_{bus}][I_{bus}] ,\quad [Z_{bus}]=[Y_{bus}]^{-1}\)
[\(Y_{bus}\)] Building
- Diagonal or Driving Point Admittance: \(\sum{\text{Admittances Connected to the Respective Bus}} + \text{Admittance Connected between Respective Bus and Ground}\)
- Off Diagonal or Transfer Admittance: \(-\text{Admittance Connected between two Buses} \Rightarrow [Y_{bus}]\text{ is Symmetric}\)
- Sum of Each Row: \(\text{Admittance Connected between Respective Bus and Ground}\)
- Density of \([Y_{bus}]\): \(\displaystyle\frac{No. of Non-Zero Elements}{Total No. of Elements}\)
- Total No. of Elements: \(n^2 ,\quad \text{n = No. of Buses}\)
- No. of Non-Zero Elements: \(\text{Diagonal}+(2\times\text{No. of Transmission Lines})\)
- Sparsity of \([Y_{bus}]\): \(\displaystyle\frac{No. of Zero Elements}{Total No. of Elements} ,\quad \text{Sparsity of }[Y_{bus}] > \text{Density of }[Y_{bus}]\Rightarrow[Y_{bus}]\text{ is a Sparse Matrix}\)
Bus-Impedance \([Z_{bus}]\) Matrix
- Bus Voltage: \([V_{bus}]=[Z_{bus}][I_{bus}] ,\quad [Z_{bus}]=[Y_{bus}]^{-1}\)
- Bus (Injected) Current: \([I_{bus}]=[Y_{bus}][V_{bus}]\)
\([Z_{bus}]\text{ Elements}\)
- Diagonal Elements: Driving Point Thevenin Impedance
- Off Diagonal Elements: Transfer Impedance
\([Z_{bus}]\text{ Building}\)
Addition of New Bus to the existing \(k^{th}\) Bus through an Impedance, \(Z_b\)
-
\(\begin{bmatrix}V_1\\\vdots\\V_k\\\vdots\\V_n\\V_p\end{bmatrix}=\begin{bmatrix}
Z_{11}&\cdots& Z_{1k}&\cdots & Z_{1n}& Z_{1k}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{n1}&\cdots& Z_{nk}&\cdots & Z_{nn}& Z_{nk}\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}+Z_b\end{bmatrix}
\begin{bmatrix}I_1\\\vdots\\I_k\\\vdots\\I_n\\I_p\end{bmatrix}\)
Addition of New Bus, \(P^{th}\) or \((n+1)^{th}) Bus to a Reference Bus
-
\(\begin{bmatrix}V_1\\\vdots\\V_k\\\vdots\\V_n\\V_p\end{bmatrix}=\begin{bmatrix}
Z_{11}&\cdots& Z_{1k}&\cdots & Z_{1n}& Z_{1k}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{n1}&\cdots& Z_{nk}&\cdots & Z_{nn}& Z_{nk}\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}+Z_b\end{bmatrix}
\begin{bmatrix}I_1\\\vdots\\I_k\\\vdots\\I_n\\I_p\end{bmatrix} ,\quad
\text{Last Row, Last Column Elements = 0 Except }Z_{kk}+Z_b \to Z_p\)
\(\begin{bmatrix}V_1\\\vdots\\V_n\\V_p\end{bmatrix}=\begin{bmatrix} Z_{11}&\cdots& Z_{1n}& 0\\\vdots&\vdots&\vdots&\vdots\\Z_{n1}&\cdots& Z_{nn}& 0\\0& 0& 0& Z_{p}\end{bmatrix} \begin{bmatrix}I_1\\\vdots\\I_n\\I_p\end{bmatrix}\)Addition of \(Z_p\) between an existing, \(k^{th}\) Bus and Reference\)
-
\(\begin{bmatrix}V_1\\\vdots\\V_k\\\vdots\\V_n\\V_p\end{bmatrix}=\begin{bmatrix}
Z_{11}&\cdots& Z_{1k}&\cdots & Z_{1n}& Z_{1k}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{n1}&\cdots& Z_{nk}&\cdots & Z_{nn}& Z_{nk}\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}+Z_b\end{bmatrix}
\begin{bmatrix}I_1\\\vdots\\I_k\\\vdots\\I_n\\I_p\end{bmatrix} ,\quad
V_p=0 ,\quad I_p=\begin{matrix}n\\\sum\\j=1\end{matrix}{c_jI_j}\)
\([Z_{bus}]^{(new)}=[Z_{bus}]^{(old)}-\displaystyle\frac{XX^T}{Z_{pp}}, \quad
Z_{pp}=Z_{kk}+Z_b ,\quad X=k^{th}\text{ column of the original matrix}\)
Addition of \(Z_b\) between two existing, \(k^{th}\) and \(j^{th}\) Buses
-
\(\begin{bmatrix}V_1\\\vdots\\V_k\\\vdots\\V_n\\V_p\end{bmatrix}=\begin{bmatrix}
Z_{11}&\cdots& Z_{1k}&\cdots & Z_{1n}& Z_{1k}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{n1}&\cdots& Z_{nk}&\cdots & Z_{nn}& Z_{nk}\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}+Z_b\end{bmatrix}
\begin{bmatrix}I_1\\\vdots\\I_k\\\vdots\\I_n\\I_b\end{bmatrix} ,\quad
V_k-V_j=I_bZ_b ,\quad I_b=\begin{matrix}n\\\sum\\j=1\end{matrix}{c_jI_j}\)
\([Z_{bus}]^{(new)}=[Z_{bus}]^{(old)}-\displaystyle\frac{XX^T}{Z_{pp}}, \quad
Z_{pp}=Z_b+Z_{jj}+Z_{kk}-2Z_{jk} ,\quad X=k^{th}\text{ column }-j^{th}\text{ column of the original matrix}\)
Removal of a Transmission Line Between two Buses
-
\(\begin{bmatrix}V_1\\\vdots\\V_k\\\vdots\\V_n\\V_p\end{bmatrix}=\begin{bmatrix}
Z_{11}&\cdots& Z_{1k}&\cdots & Z_{1n}& Z_{1k}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}\\
\vdots&\vdots& \vdots&\vdots &\vdots &\vdots\\
Z_{n1}&\cdots& Z_{nk}&\cdots & Z_{nn}& Z_{nk}\\
Z_{k1}&\cdots& Z_{kk}&\cdots & Z_{kn}& Z_{kk}+Z_b\end{bmatrix}
\begin{bmatrix}I_1\\\vdots\\I_k\\\vdots\\I_n\\I_b\end{bmatrix} ,\quad
\text{Add an Impedance of -Z between those two buses}\)
Load Flow Analysis
Static Power Transfer Equation
\(\begin{array}{l} \bar{S}_S = \bar V_S \bar I_S^{*} = |V_S|\angle{\delta} \left[\displaystyle\frac{|D|}{|B|}|V_S|\angle{\beta-\Delta-\delta}-\displaystyle\frac{|V_R|}{|B|}\angle{\beta}\right] = \displaystyle\frac{|D|}{|B|}|V_S|^2\angle{\beta-\Delta} - \displaystyle\frac{|V_S| |V_R|}{|B|}\angle{\beta+\delta} \approx \left[\displaystyle\frac{1}{X}|V_S|^2\angle{90^\circ}\right] - \left[\displaystyle\frac{|V_S| |V_R|}{X}\angle{(90^\circ-\delta)}\right] \\ \bar{S}_R = \bar V_R \bar I_R^{*} = |V_R|\angle{0} \left[\displaystyle\frac{|V_S|}{|B|}\angle{\beta-\delta} - \displaystyle\frac{|A|}{|B|}|V_R|\angle{\beta-\alpha}\right] = \displaystyle\frac{|V_S| |V_R|}{|B|}\angle{\beta-\delta} - \displaystyle\frac{|A|}{|B|}|V_R|^2\angle{\beta-\alpha} \approx \left[\displaystyle\frac{|V_S| |V_R|}{X}\angle{(90^\circ-\delta)}\right] - \left[\displaystyle\frac{1}{X}|V_R|^2\angle{90^\circ}\right] \\ \end{array}\)
Real Power Flows from Higher Load Angle to Lower Load Angle
Reactive Power Flows from Higher Voltage to Lower Voltage
\(\begin{array}{|c|c|c|}\hline \textbf{Sending End Reactive Power} & \textbf{Receiving End Reactive Power} & \textbf{Direction of Reactive Power} \\\hline Q_S > 0 \Rightarrow \text{Over Excited} & Q_R > 0 \Rightarrow \text{Inductive Load} & \text{Source gives to Line, Line gives to Load}\\\hline Q_S > 0 \Rightarrow \text{Over Excited} & Q_R < 0 \Rightarrow \text{Capacitive Load} & \text{Line absorbs from both source and load}\\\hline Q_S < 0 \Rightarrow \text{Under Excited} & Q_R > 0 \Rightarrow \text{Inductive Load} & \text{Line gives to both source and load}\\\hline Q_S < 0 \Rightarrow \text{Under Excited} & Q_R < 0 \Rightarrow \text{Capacitive Load} & \text{Load gives to Line, Line gives to Source}\\\hline \end{array}\)Bus Classification
\(\begin{array}{l c l} \text{Generator Bus}&:&\text{PV-Bus}\\ & & Q_{gi}< Q_{gi(min)}\Rightarrow\text{PV-Bus becomes PQ-Bus}\\ & & Q_{gi}> Q_{gi(max)}\Rightarrow\text{PV-Bus becomes PQ-Bus}\\ \text{Load Bus}&:&\text{PQ-Bus}\\ & & V_{i}< V_{i(min)}\Rightarrow\text{PQ-Bus becomes PV-Bus}\\ & & V_{i}> V_{i(max)}\Rightarrow\text{PQ-Bus becomes PV-Bus}\\ \text{Voltage Controlled Bus}&:&\text{PV-Bus with no generator but with variable reactive power compensators}\\ & & \text{Buses with fixed shunt-L or fixed shunt-C are considered PQ buses}\\ \text{Reference Bus}&:&\text{Swing or Slack (Responsible) Bus: }V\delta\text{-Bus}\\ & & \text{If V is More (No Change from}\E_g\text{, No Droop generator) this bus belivers Q}\\ & & \text{If }\delta\text{ is More (Highest Capacity of all the other generators in the system) this bus belivers P}\\ \end{array}\)Load Flow Solution
\(\begin{array}{l c l} \text{Basic Load Flow Equation}&:& S_i=S_{gi}-S_{di}=V_iI_i^{*}=P_i+jQ_i\\ & & S_i^{*}=V_i^{*}I_i=P_i-jQ_i\Rightarrow I_{i}=\displaystyle\frac{P_i-jQ_i}{V_i^{*}}\\ & & I_i=\begin{matrix}n\\\sum\\k=1\end{matrix}{Y_{ik}V_k} =Y_{ii}V_i+\begin{matrix}n\\\sum\\k=1\\k\neq i\end{matrix}{Y_{ik}V_k}\\ & & \Rightarrow V_i=\displaystyle\frac{1}{Y_{ii}}\left[\displaystyle\frac{P_i-jQ_i}{V_i^{*}} -\begin{matrix}n\\\sum\\k=1\\k\neq i\end{matrix}{Y_{ik}V_k}\right]\\ \text{Gauss Method}&:& V_i^{(m+1)}=\displaystyle\frac{1}{Y_{ii}}\left[\displaystyle\frac{P_i-jQ_i}{\left[V_i^{(m)}\right]^{*}} -\begin{matrix}n\\\sum\\k=1\\k\neq i\end{matrix}{Y_{ik}V_k^{(m)}}\right]\\ \text{Gauss-Seidel Method}&:& V_{i, GS}^{(m+1)}=\displaystyle\frac{1}{Y_{ii}}\left[\displaystyle\frac{P_i-jQ_i}{\left[V_i^{(m)}\right]^{*}} -\begin{matrix}i-1\\\sum\\k=1\end{matrix}{Y_{ik}V_k^{(m+1)}} -\begin{matrix}n\\\sum\\k=i+1\end{matrix}{Y_{ik}V_k^{(m)}}\right]\\ & &\text{Acceleration Factor, }\alpha=\text{1.3 to 1.6}\Rightarrow V_{i, acc}^{(m+1)}=V_i^{(m)}+\alpha\left(V_{i, GS}^{(m+1)}-V_i^{(m)}\right)\\ & &\text{Intermediate voltage, }V_{i, GS}^{(m+1)}\text{ is calculated using Gauss-Seidel formula and the}\\ & & \text{acceleration formula is applied on the intermediate voltage to get a final improved voltage, }V_{i, acc}^{(m+1)}\\ & & \text{and then immediately this final value is used to solve for the very next bus within the same iteration}\\ & & \text{to achieve faster overall convergence}\\ \text{Newton-Raphson Method}&:& \text{Missmatch Vector}=\text{Jacobian}\times\text{Correction Vector}\Rightarrow \begin{bmatrix}\Delta P\\\Delta Q\end{bmatrix}_{(2PQ+PV)\times(1)}= \begin{bmatrix}\displaystyle\frac{\partial P}{\partial\delta}&\displaystyle\frac{\partial P}{\partial|V|}\\ \displaystyle\frac{\partial Q}{\partial\delta}&\displaystyle\frac{\partial Q}{\partial|V|}\end{bmatrix}_{(2PQ+PV)\times(2PQ+PV)} \begin{bmatrix}\Delta\delta\\\Delta|V|\end{bmatrix}_{(2PQ+PV)\times(1)}\\ & & \Rightarrow \begin{bmatrix}\Delta P\\\Delta Q\end{bmatrix}_{(2PQ+PV)\times(1)}= \begin{bmatrix}[J_1]_{(PQ+PV)\times(PQ+PV)}&[J_2]_{(PQ+PV)\times(PQ)}\\ [J_3]_{(PQ)\times(PQ+PV)}&[J_4]_{(PQ)\times(PQ)}\end{bmatrix}_{(2PQ+PV)\times(2PQ+PV)} \begin{bmatrix}\Delta\delta\\\Delta|V|\end{bmatrix}_{(2PQ+PV)\times(1)}\\ & & \Rightarrow[J]=\begin{bmatrix}(\text{P is known on which buses})\times(\delta\text{ is unknown on which buses})& (\text{P is known on which buses})\times(|V|\text{ is unknown on which buses})\\ (\text{Q is known on which buses})\times(\delta\text{ is unknown on which buses})& (\text{Q is known on which buses})\times(|V|\text{ is unknown on which buses}) \end{bmatrix}\\ & & \Rightarrow \begin{bmatrix}\Delta\delta\\\Delta|V|\end{bmatrix}_{(2PQ+PV)\times(1)}= \begin{bmatrix}\displaystyle\frac{\partial P}{\partial\delta}&\displaystyle\frac{\partial P}{\partial|V|}\\ \displaystyle\frac{\partial Q}{\partial\delta}&\displaystyle\frac{\partial Q}{\partial|V|}\end{bmatrix}^{-1} \begin{bmatrix}\Delta P\\\Delta Q\end{bmatrix}_{(2PQ+PV)\times(1)}\\ \text{Fast Decoupled Load Flow}&:&\displaystyle\frac{\partial P}{\partial|V|}=0 ,\quad \displaystyle\frac{\partial Q}{\partial\delta}=0\\ & & \Rightarrow \begin{bmatrix}\Delta\delta\\\Delta|V|\end{bmatrix}_{(2PQ+PV)\times(1)}= \begin{bmatrix}\displaystyle\frac{\partial P}{\partial\delta}& 0\\ 0 &\displaystyle\frac{\partial Q}{\partial|V|}\end{bmatrix}^{-1} \begin{bmatrix}\Delta P\\\Delta Q\end{bmatrix}_{(2PQ+PV)\times(1)}\\ \end{array}\)
\(\begin{array}{|l|l|l|l|}\hline \textbf{Criteria} & \textbf{GS} & \textbf{N-R} & \textbf{FD} \\\hline \text{Calculation} & \text{Easy} & \text{Highest} & \text{Moderate} \\\hline \text{Number of iteration} & \text{Large} & \text{Moderate} & \text{Least} \\\hline \text{Time taken for 1 iteration} & \text{Least} & \text{Highest} & \text{Moderate} \\\hline \text{Convergence} & \text{Linear} & \text{Quadratic} & \text{Geometric} \\\hline \text{Accuracy} & \text{Good} & \text{Best} & \text{Good} \\\hline \end{array}\)
Fault Analysis
Per Unit System
- Given Bases: \(V_{l.b} ,\quad S_{3\phi.{b}}\)
- Derived Bases: \(I_{l.b} = \displaystyle\frac{S_{3\phi.{b}}}{\sqrt{3}V_{l.b}} ,\quad Z_b = \displaystyle\frac{V_{ph.b}}{I_{ph.b}}\)
- PU quantity: \(\text{per unit value} = \displaystyle\frac{\text{actual value}}{\text{base value}}\)
- Change of Base: \(\text{new per unit value} = \displaystyle\frac{\text{old per unit value} \times \text{old base}}{\text{new base}}\)
Types of Faults
Open Circuit Faults
One Line Open
- Near The Generator
- At a Far End on the Line
Two Lines Open
- Near The Generator
- At a Far End on the Line
All Three Lines Open
- Near The Generator
- At a Far End on the Line
Short Circuit Faults
Symmetrical Short Circuit Faults
LLL Faults
- Near The Generator
- At a Far End on the Line
LLLG Faults
- Near The Generator
- At a Far End on the Line
Unsymmetrical Short Circuit Faults
LG Faults
- Near The Generator
- At a Far End on the Line
LL Faults
- Near The Generator
- At a Far End on the Line
LLG Faults
- Near The Generator
- At a Far End on the Line
Symmetrical Components
Sequence Components
\(\begin{array}{l c l} \text{Idea} &:& \text{Unbalanced system = (+ve sequence + -ve sequence + 0 sequence) components}\\ && V_a=V_{a1}+V_{a2}+V_{a0}\\ && V_b=V_{b1}+V_{b2}+V_{b0}=\alpha^2V_{a1}+\alpha V_{a2}+V_{a0}\\ && V_c=V_{c1}+V_{c2}+V_{c0}=\alpha V_{a1}+\alpha^2V_{a2}+V_{a0}\\ && \begin{bmatrix}V_a\\V_b\\V_c\end{bmatrix} = \begin{bmatrix}1& 1& 1\\\alpha^2&\alpha& 1\\\alpha&\alpha^2& 1\end{bmatrix} \begin{bmatrix}V_{a1}\\V_{a2}\\V_{a0}\end{bmatrix} \Rightarrow \begin{bmatrix}V_{a1}\\V_{a2}\\V_{a0}\end{bmatrix} = \frac{1}{3} \begin{bmatrix}1&\alpha&\alpha^2\\1&\alpha^2&\alpha\\1& 1& 1\end{bmatrix} \begin{bmatrix}V_a\\V_b\\V_c\end{bmatrix}\\ && \begin{bmatrix}V_a\\V_b\\V_c\end{bmatrix} = \begin{bmatrix}1& 1& 1\\1&\alpha^2&\alpha\\1&\alpha&\alpha^2\end{bmatrix} \begin{bmatrix}V_{a0}\\V_{a1}\\V_{a2}\end{bmatrix} \Rightarrow \begin{bmatrix}V_{a0}\\V_{a1}\\V_{a2}\end{bmatrix} = \frac{1}{3} \begin{bmatrix}1& 1& 1\\1&\alpha&\alpha^2\\1&\alpha^2&\alpha\end{bmatrix} \begin{bmatrix}V_a\\V_b\\V_c\end{bmatrix}\\ && S = \begin{bmatrix}V_a& V_b& V_c\end{bmatrix} \begin{bmatrix}I_a\\I_b\\I_c\end{bmatrix}^{*} = \begin{bmatrix}V^{abc}\end{bmatrix}^T \begin{bmatrix}I^{abc}\end{bmatrix}^{*} = 3 \begin{bmatrix}V^{012}\end{bmatrix}^T \begin{bmatrix}I^{012}\end{bmatrix}^{*}\\ && \text{Neutral Current, }I_n=I_a+I_b+I_c=3I_{a0}\\ \end{array}\)Sequence Networks
- Y-Load: \(Z_1=Z_2=Z_{load} ,\quad Z_0=Z_{load}+3Z_{grounding}\)
- \(\Delta\)-Load: \(Z_1=Z_2=\frac{Z_{load}}{3} ,\quad Z_0=\infty ,\quad I_0 \text{ in loop}\)
- Y-Alternator: \(Z_1=\begin{cases}jX_d^{"} & \text{(sub-transient)}\\ jX_d^{'} & \text{(transient)}\\ jX_d & \text{(steady-state)}\end{cases} ,\quad Z_2=j\displaystyle\frac{X_d^{"}+X_q^{"}}{2} ,\quad Z_0=Z_{g0}+3Z_{grounding}\)
- \(\Delta\)-Alternator: \(Z_1=\begin{cases}jX_d^{"} \text{ (sub-transient)}\\ jX_d^{'} \text{ (transient)}\\ jX_d \text{ (steady-state)}\end{cases} ,\quad Z_2=j\displaystyle\frac{X_d^{"}+X_q^{"}}{2} ,\quad Z_0=\infty ,\quad I_0 \text{ in loop}\)
- Transformer: \(Z_1=Z_2=jX_l ,\quad Z_0=\text{depends on star/ delta on primary and secondary}\)
- Transmission Line: \(Z_1=Z_2=Z_{line} ,\quad Z_0\approx3Z_1=3Z_2\)
Transients
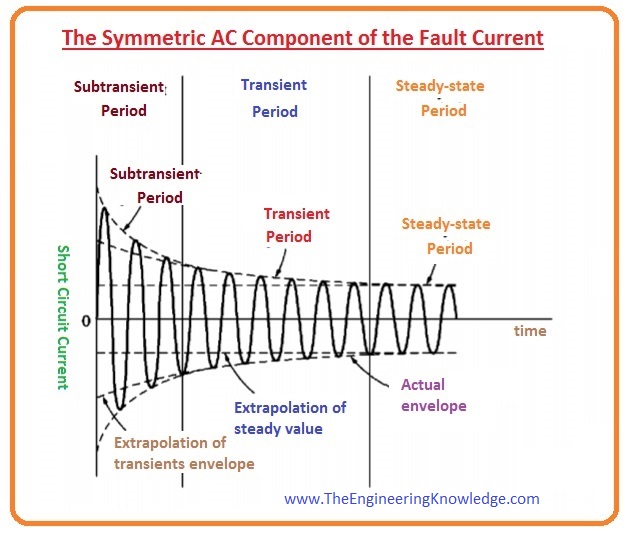
\(\begin{array}{l c l} \text{Transient Current Equation} &:& i = \displaystyle\frac{V_m}{|Z|}\sin{(\theta-\alpha)}e^{-t/\tau} + \displaystyle\frac{V_m}{|Z|} \sin{[\omega t- (\theta - \alpha)]} ,\quad \phi = \tan^{-1}\frac{\omega L}{R}\\ && \text{first 3 cycles are sub-transient period}\\ && \text{sub-transient period: Rapid Decay: damper winding action}\\ && \text{next 30 cycles are transient period}\\ && \text{transient period: Slower Decay: Main field action: CB Operation Period}\\ && \text{Sub-transient reactance, }X_d^{"} < \text{transient reactance, }X_d^{'} < \text{steady state, }X_d\\ \text{Asymmetrical RMS } I_{fault}&:& I_{asy, rms} = \sqrt{{DC}^2+{AC}^2}=\displaystyle\frac{V_m}{\sqrt{2}|Z|}\\ && \text{asymmetrical: decaying dc + decaying ac}\\ && \text{decaying ac: due to varying reactance}\\ \text{Maximum Momentary Current} &:& I_{mm} \approx 2.55 \times I_{asy, rms}\\ \end{array}\)
Fault Reactance
\(\begin{array}{l c l} \text{Before the Fault} &:& \text{Steady State Reactance, } X_d\\ \text{During the Fault} &:& \text{Sub-Transient Reactance, } X_d^{"}\\ \text{After the Fault} &:& \text{Transient Reactance, } X_d^{'}\\ \text{Final Settling Point} &:& \text{Steady State Reactance, } X_d\\ \text{Order of Magnitude} &:& X_d^{"} < X_d^{"} < X_d\\ \end{array}\)
Fault Classification
Series (Open Circuit) Faults
- One Phase Open
- Two Phases Open
- All Three Phases Open
Shunt (Short Circuit) Faults
Symmetrical Short Circuit Faults
- LLLG: Most Severe on Transmission Lines
- LLL
Unsymmetrical Short Circuit Faults
- LLG
- LL
- LG: Most Severe near alternator, Most Frequent on transmission lines
Symmetrical Fault Analysis
LLL Fault
\(\begin{array}{l c l} \text{Fault Current} &:& I_f=I_{a1}=\displaystyle\frac{E}{Z_{+ve}+Z_{fault}}\\ \text{Short Circuit MVA} &:& \text{SC-MVA} = \text{SC-MVA}_{\text{pu}} \times S_{base} \Rightarrow \text{SC-MVA}_{\text{pu}} = I_{a1, pu}^{*}=\displaystyle\frac{1}{Z_{+ve}+Z_{fault}}\\ \end{array}\)LLLG Fault
\(\begin{array}{l c l} \text{Fault Current} &:& I_f=I_{a1}\displaystyle\frac{E}{Z_{+ve}}\\ \text{Short Circuit MVA} &:& \text{SC-MVA} = \text{SC-MVA}_{\text{pu}} \times S_{base} \Rightarrow \text{SC-MVA}_{\text{pu}} = I_{a1, pu}^{*}=\displaystyle\frac{1}{Z_{+ve}}\\ \end{array}\)
Unsymmetrical Fault Analysis
LG Fault
\(\begin{array}{l c l} \text{Fault Current} &:& I_{a1}=I_{a2}=I_{a0}=\displaystyle\frac{I_a}{3} \Rightarrow I_f = 3I_{a1} = \displaystyle\frac{V_a}{3Z_{fault}} = \displaystyle\frac{E_a}{Z_1+Z_2+Z_0+3Z_n+3Z_{fault}}\\ \text{Short Circuit MVA} &:& \text{SC-MVA} = \text{SC-MVA}_{\text{pu}} \times S_{\text{base}} ,\quad \text{SC-MVA}_{\text{pu}} = I_{a1, pu}\\ \end{array}\)LL Fault
\(\begin{array}{l c l} \text{Fault Current} &:& I_{a1}=-I_{a2}=j\displaystyle\frac{I_b}{\sqrt{3}} ,\quad I_a0=0 ,\quad I_f=I_b=-j\sqrt{3}I_{a1} ,\quad I_{a1}=\displaystyle\frac{E_a}{Z_1+Z_2+Z_f} \Rightarrow I_{a1, pu}=\displaystyle\frac{1}{Z_1+Z_2+Z_f}\\ \text{Short Circuit MVA} &:& \text{SC-MVA} = \text{SC-MVA}_{\text{pu}} \times S_{\text{base}} ,\quad \text{SC-MVA}_{\text{pu}} = I_{a1, pu}\\ \end{array}\)LLG Fault
\(\begin{array}{l c l} \text{Fault Current} &:& I_f=I_b+I_c=3I_{a0} ,\quad I_{a0}=\frac{V_{a0}-V_{a1}}{3Z_{fault}}=\frac{V_{a0}-V_{a2}}{3Z_{fault}} ,\quad I_{a1}=\displaystyle\frac{E_a}{Z_1+ [Z_2\parallel(Z_0+3Z_n+3Z_f)]} I_{a1, pu}=\displaystyle\frac{1}{Z_1+ [Z_2\parallel(Z_0+3Z_n+3Z_f)]} I_{a0}=-\displaystyle\frac{I_{a1}Z_2}{Z_2+Z_0+3Z_n+3Z_f}\\ \text{Short Circuit MVA} &:& \text{SC-MVA} = \text{SC-MVA}_{\text{pu}} \times S_{\text{base}} ,\quad \text{SC-MVA}_{\text{pu}} = I_{a1, pu}\\ \end{array}\)
Fault Analysis With \([Z_{bus}]\) Matrix
\(\begin{array}{l c l} \text{Fault Current}&:&\displaystyle\frac{V_{prefault}}{Z_{+ve}+Z_{fault}}=\displaystyle\frac{V_{pf, i}}{Z_{ii}+Z_{fault}} ,\quad Z_{ii}=Z_{th} \text{ of }i^{th}\text{ bus}\\ \text{Fault at }k^{th}\text{ bus on No-Load}&:& \Delta V_k=0 ,\quad \Delta I_k=-I_{fault} ,\quad [V]=[Z][I]\Rightarrow[\Delta V]=[Z][\Delta I] \\ & & \Delta V_k=-I_{fault}Z_{kk} ,\quad I_{fault}=\displaystyle\frac{V_k}{Z_{kk}+Z_{fault}}\approx\displaystyle\frac{V_k}{Z_{kk}}\\ & & \text{Change in Voltage of }j^{th}\text{ bus: }\Delta V_j=Z_{jk}(-I_{fault})=-Z_{jk}\displaystyle\frac{V_k}{Z_{kk}} \Rightarrow V_j^{(new)}=V_j^{(old)}+\Delta V_j=V_j-\displaystyle\frac{Z_{jk}}{Z_{kk}}V_k\\ & & \text{Fault Current supplied by the generator at }j^{th}\text{ bus: }I_j=\displaystyle\frac{E_j-V_j^{(new)}}{jX_d^{"}} =\displaystyle\frac{V_j^{(old)}-V_j^{(new)}}{jX_d^{"}}=\displaystyle\frac{Z_{jk}}{Z_{kk}}\times\displaystyle\frac{V_k}{jX_D^{"}}\\ \end{array}\)
Stability Analysis
Voltage Stability (\( \pm 5\% \))
- Generator Side Voltage Control - Automatic Voltage Regulator
Load Side Voltage Control
Shunt Compensation - Q control
Shunt Capacitor - To Compensate for Lagging Loads
\(\begin{array}{l} |V_R| = |V_S| - \displaystyle\frac{X}{|V_S|}Q_S \\ \textbf{Before: } |V_{R1}| = |V_S| - \displaystyle\frac{X}{|V_S|}Q_S = |V_S| - \displaystyle\frac{X}{|V_S|}Q_{load} \\ \textbf{After: } Q_S=Q_{load}-Q_{Sh}\Rightarrow|V_{R2}|=|V_S|-\displaystyle\frac{X}{|V_S|}Q_{load}+\displaystyle\frac{X}{|V_S|}Q_{Sh}\\ \Delta{|V_R|} = |V_{R2}| - |V_{R1}| = \displaystyle\frac{X}{|V_S|}Q_{Sh} \text{ from here Q_{Sh} needed for desired |V_R| is calculated} \\ \hline \textbf{Before: } S_1 = P_L + jQ_L \Rightarrow \phi_1 = \tan^{-1}\displaystyle\frac{Q_L}{P_L} \\ \textbf{After: } S_2 = P_L + j(Q_L - Q_{Sh}) \Rightarrow \phi_2 = \tan^{-1}\displaystyle\frac{Q_L-Q_{Sh}}{P_L} \Rightarrow \text{ pf improved}\\ \end{array}\)Shunt Reactor - To Compensate for Ferranti Effect
\(\begin{array}{l} |V_R| = |V_S| - \displaystyle\frac{X}{|V_S|}Q_S \\ \textbf{Before: } |V_{R1}| = |V_S| - \displaystyle\frac{X}{|V_S|}Q_S = |V_S| + \displaystyle\frac{X}{|V_S|}Q_{load} \\ \textbf{After: } Q_S=Q_{Sh}-Q_{load}\Rightarrow|V_{R2}|=|V_S|+\displaystyle\frac{X}{|V_S|}Q_{load}-\displaystyle\frac{X}{|V_S|}Q_{Sh}\\ \Delta{|V_R|} = |V_{R1}| - |V_{R2}| = \displaystyle\frac{X}{|V_S|}Q_{Sh}\text{ from here }Q_{Sh}\text{ needed for desired |V_R| is calculated}\\ \textbf{Alternately: } X_{L(Sh)} = \displaystyle\frac{|B|}{1 - |A|} \\ \end{array}\)
Series Compensation - X control
Series Capacitor - To Increase Stability
\(\begin{array}{l} \textbf{Before: } |V_S| - |V_{R1}| = IR\cos\phi_R + IX\sin\phi_R \\ \textbf{After: } |V_S| - |V_{R2}| = IR\cos\phi_R + I(X-X_C)\sin\phi_R \\ \Rightarrow |V_{R2}| - |V_{R1}| = IX_C\sin\phi_R \text{ by controlling } X_C, \Delta{V_R} \text{ can be controlled} \\ \hline \textbf{Before: } P_{max1} = \displaystyle\frac{|V_S||V_R|}{X} \\ \textbf{After: } P_{max2} = \displaystyle\frac{|V_S||V_R|}{X-X_C} \\ \Rightarrow \text{ by controlling } X_C, P_{max} \text{ can be controlled} \Rightarrow \text{Stability limit is increased} \\ \hline \textbf{Before: } I_{fault1} = \displaystyle\frac{|V_S|}{X} \\ \textbf{After: } I_{fault2} = \displaystyle\frac{|V_S|}{X-X_C} \\ \Rightarrow \text{ by controlling } X_C, V_R \text{ and } P_{max} \text{ are improved but the fault currents become detrimental}\\ \hline \text{LC oscillator (less than synchronous frequency) due to compensating series capacitor + turbine system natural frequency} \\ \Rightarrow \text{Sub-Synchronous Resonance} \Rightarrow \text{Transient Torques, Torsional Interactions and Induction Generator Effect} \\ \Rightarrow \text{Shaft Damage due to Fatigue and Equipment Damage} \\ \end{array}\)- Series Reactor - To Control the Real Power Flow in the Parallel Lines Connected to the Same Bus Bar
Dynamic Voltage Control - Using a Synchronous Condenser or a Synchronous Phase Modifier
\(\begin{array}{|c|c|}\hline \textbf{Excitation} & \textbf{Reactive Power} \\\hline \text{Under Excited} & \text{Q is absorbed by the synchronous motor} \\\hline \text{Critically Excited} & \text{Q is neither absorbed nor delivered by the synchronous motor} \\\hline \text{Over Excited} & \text{Q is delivered by the synchronous motor} \\\hline \end{array}\)FACTS devices
\(\begin{array}{l c l} \text{Sh-Static VAR Compensator}&:&\text{Thyristor Controlled Reactors:continuous}\\ &&\text{Thyristor Switched Reactors:stepped} \\ &&\text{Thyristor Switched Capacitors:stepped} \\ \text{Series compensators} &&\text{Thyristor Controlled Series Capacitor} \\ \text{Voltage Source Converters}&:&\text{Sh-STATCOM: Static Sync' Compensator}\\ &&\text{Se-SSSC: Static Sync' Series Compensator}\\ \text{Hybrid Converters}&:&\text{UPFC: Unified Power Flow Controller (Se+Sh)}\\ &&\text{IPFC: Interline Power Flow Controller (Se+Se)} \\ \end{array}\)
Frequency Stability (\( \pm 2\% \))
- Primary Control - Speed Governor on Generator Side
Secondary Control
- Flat Frequency Control - Excess Load is handled by 0 droop Generators
- Parallel Frequency Control - Excess Load is distributed between parallelly operating generators
Flat Tie-Line Control - Tie-Line Power is Maintained Constant
Area Frequency Response Characteristics
\(\begin{array}{l} \Delta{f} \propto \Delta{P} \Rightarrow \Delta{f} = \displaystyle\frac{R}{1 + RB} \Delta{P} \\ R = -\displaystyle\frac{\partial{f}}{\partial{P_G}} ,\quad B = \displaystyle\frac{\partial{P_D}}{\partial{f}}\\ \end{array}\)Area Control Error
\(\begin{array}{l} \text{ACE} = P_{\text{actual}}-P_{\text{scheduled}} = \Delta{P_{tie}} + B\Delta{f} \end{array}\)
Power Angle Stability (\( 20^\circ \text{ to } 30^\circ\))
Swing Equation
\(\begin{array}{l c l} \text{Kinetic Energy, Mechanical} &:& K.E. = \displaystyle\frac{1}{2}Mv^2 \to \displaystyle\frac{1}{2}J\omega_{sm}^2\\ \text{Kinetic Energy, Electrical} &:& \theta_{e}=\displaystyle\frac{P}{2}\theta_{m} \Rightarrow \theta_m=\displaystyle\frac{2}{P}\theta_e \Rightarrow \displaystyle\frac{d\theta_m}{dt}=\displaystyle\frac{2}{P}\displaystyle\frac{d\theta_e}{dt} \Rightarrow \omega_{sm}=\displaystyle\frac{2}{P}\omega_s\\ & & K.E.=\displaystyle\frac{1}{2}J\omega_{sm}^2 =\displaystyle\frac{1}{2}M\omega_s ,\quad M=\displaystyle\frac{J\omega_s}{(P/2)^2} =\displaystyle\frac{K.E.}{(\omega_s/2)}MJ-s/^c(elec)\\ & & K.E.=S_{base}H=GH ,\quad H=\displaystyle\frac{K.E.}{G}MJ/MVA \Rightarrow M=\displaystyle\frac{GH}{\pi f}MJ-s/^c(elec)\\ \text{Swing Equation, Mechanical} &:& \tau_{net}=\tau_{shaft}-\tau_{electromagnetic} \Rightarrow J\displaystyle\frac{d^2\theta_m}{dt^2}=\tau_{shaft}-\tau_{electromagnetic}\\ \text{Swing Equation, Electrical} &:& J\frac{d^2\theta_m}{dt^2}=\tau_{sh}-\tau_{em} \Rightarrow M\displaystyle\frac{d^2\theta_e}{dt^2}=P_s-P_e\\ & &\theta_{e}=\omega_st+\delta\Rightarrow\displaystyle\frac{d\theta_e}{dt}=\omega_s+\displaystyle\frac{d\delta}{dt}\Rightarrow \omega=\omega_s+\displaystyle\frac{d\delta}{dt}\\ & & \displaystyle\frac{d\theta_e}{dt}=\omega_s+\displaystyle\frac{d\delta}{dt}\Rightarrow \displaystyle\frac{d^2\theta_e}{dt^2}=\displaystyle\frac{d^\delta}{dt^2}\Rightarrow M\displaystyle\frac{d^2\theta_e}{dt^2}=P_s-P_e\to M\displaystyle\frac{d^2\delta}{dt^2}=P_s-P_e\\ \text{Multi-Machine Systems} &:& \text{Coherent Swing: }\delta_1=\delta_2=\cdots=\delta_i \Rightarrow M=\sum{M_i} ,\quad P_s=\sum{P_{si}},\quad P_e=\sum{P_{ei}}\\ & &\text{Incoherent Swing: }\delta_1\neq\delta_2 \Rightarrow M^{-1}=M_1^{-1}+M_2^{-1}\\ \end{array}\)Steady State Stability
\(\begin{array}{l c l} \text{Small Change in Load Angle} &:& \delta_{new}=\delta_{old}+\Delta\delta\\ & & P_e=P_{max}\sin\delta\Rightarrow P_{e, new}=P_{max}\sin(\delta_{old}+\Delta\delta) \Rightarrow P_{e, new}=P_{e, old}+P_{max}\cos\delta_{old}\Delta\delta\\ & & M\displaystyle\frac{d^2\delta}{dt^2}=P_s-P_e \Rightarrow M\displaystyle\frac{d^2\delta_{new}}{dt^2}=P_s-P_{e,new}\\ & & \Rightarrow M\displaystyle\frac{d^2(\delta_{old}+\Delta\delta)}{dt^2}=P_s-P_{e, old}-P_{max}\cos\delta_{old}\Delta\delta \Rightarrow M\displaystyle\frac{d^2\Delta\delta}{dt^2}=-P_{max}\cos\delta_{old}\Delta\delta\\ \text{Synchronizing Power Coefficient}&:&\text{Stiffness Coefficient: }P_s=\displaystyle\frac{dP_e}{d\delta}\Big|_{\delta=\delta_0}=P_{max}\cos\delta_0\\ & & \displaystyle\frac{dP_e}{d\delta}\Big|_{\delta=\delta_0} > 0 \Rightarrow \text{System is absolutely stable}\\ & & \displaystyle\frac{dP_e}{d\delta}\Big|_{\delta=\delta_0} = 0 \Rightarrow \text{System is marginally stable}\\ & & \displaystyle\frac{dP_e}{d\delta}\Big|_{\delta=\delta_0} < 0 \Rightarrow \text{System is unstable}\\ \text{Natural Frequency of Electromechanical Oscillations}&:& \omega_n=\sqrt{\displaystyle\frac{P_s}{M}}\\ \text{Steady State Stability Limit}&:& P_{max}=\displaystyle\frac{EV}{X}\\ \end{array}\)Transient Stability
Equal Area Criteria
\(\begin{array}{l c l} \text{Before the Fault} &:& \text{Initial Steady State Stability Limit, } P_{maxI}=\displaystyle\frac{EV}{X_I}\\ \text{During the Fault} &:& \text{Transient Stability Limit, } P_{maxII}=\displaystyle\frac{EV}{X_{II}}\\ \text{After the Fault is cleared} &:& \text{Final Steady State Stability Limit, } P_{maxIII}=\displaystyle\frac{EV}{X_{III}}\\ \text{Order of Magnitude} &:& X_{I} \leq X_{III} < X_{II} \Rightarrow P_{maxI} \geq P_{maxIII} > P_{maxII} \\ \text{Modified Swing Equation} &:& M\displaystyle\frac{d^2\delta}{dt^2}=P_s-P_e=P_a \Rightarrow \displaystyle\frac{d^2\delta}{dt^2}=\displaystyle\frac{P_a}{M} \Rightarrow \displaystyle\frac{d\delta}{dt}=\omega-\omega_s=\sqrt{\displaystyle\frac{2}{M}\int_{\delta_0}^{\delta}{P_a}d\delta} \Rightarrow \int_{\delta_0}^{\delta}{P_a}d\delta = 0 \text{ (for stability)}\\ & & \int_{\delta_0}^{\delta}{P_a}d\delta = 0 \Rightarrow \text{accelerating area = decelerating area}\\ \end{array}\)Varying Prime Mover Input
\(P_{s1}(\delta_2-\delta_0)=P_{max}(\cos\delta_0-\cos\delta_2)\)Fault occurs Near the Bus
\(\begin{array}{l c l} \text{Critical Clearing Angle} &:& P_{max}\cos\delta_{cr}=P_s(\delta_{max}-\delta_0)+P_{max}\cos\delta_{max}\\ \text{Critical Clearing Time} &:& t_{cr}=\sqrt{\displaystyle\frac{2H}{\pi f P_s} (\delta_{cr}-\delta_0)}\\ \end{array}\)Fault occurs in the middle of the Line
\(\begin{array}{l c l} \text{Critical Clearing Angle} &:& (P_{maxIII}-P_{maxII})\cos\delta_{cr} = P_s(\delta_{max}-\delta_0)-P_{maxII}\cos\delta_0+P_{maxIII}\cos\delta_{max}\\ \end{array}\)Fault occurs Near the Bus on One of the two Parallel Lines
\(\begin{array}{l c l} \text{Critical Clearing Angle} &:& P_{maxIII}\cos\delta_{cr}=P_s(\delta_{max}-\delta_0)+P_{maxIII}\cos\delta_{max}\\ & &\delta_0=\sin^{-1}\left(\displaystyle\frac{P_s}{P_{maxI}}\right) ,\quad \delta_{max}=180^\circ-\sin^{-1}\left(\displaystyle\frac{P_s}{P_{maxIII}}\right)\\ \end{array}\)One of the two Parallel Lines is removed
\(\begin{array}{l c l} \text{Critical Clearing Angle} &:& P_s(\delta_{max}-\delta_0)=P_{maxII}(\cos\delta_0-\cos\delta_{max})\\ \end{array}\)
Power Distribution
Distribution Topologies
- Radial
- Parallel
- Ring Main
DC Distribution
Source fed from one end
\(\begin{array}{l c l} \text{step-1} &:& \text{Apply KCL at all the nodes} \\ \text{step-2} &:& \text{Apply KVL in all the loops} \\ \end{array}\)Source fed from both ends
\(\begin{array}{l c l} \text{Point of minimum voltage} &:& \text{Point where current reversal is observed} \\ \end{array}\)Ring Main Distributon
\(\begin{array}{l c l} \text{Point of minimum voltage} &:& \text{Point where current reversal is observed} \\ \end{array}\)Uniform Distribution
\(\begin{array}{l c l} \text{step-1} &:& \text{Apply KCL at all the nodes} \\ \text{step-2} &:& \text{Apply KVL in all the loops} \\ \end{array}\)
AC Distribution
Source fed from one end
\(\begin{array}{l c l} \text{step-1} &:& \text{Apply KCL at all the nodes} \\ \text{step-2} &:& \text{Apply KVL in all the loops} \\ \end{array}\)
Protection Equipment
Fuses
Fuse Law
\(\begin{array}{l c l} \text{Joules Law} &:& I^2Rt \geq Q_{limit}\\ \text{Fusing Factor} &:& \displaystyle\frac{\text{Minimum Fusing Current}}{\text{Rated Current of Fuse}}\\ \text{} &:& \\ \end{array}\)Air Break Switches
- Load Isolator (On Load Switch)
- Line Isolator (No Load Switch)
- Jumper Cut Points
LT Fuses
Catridge Fuses
- High Rupturing Capacity Fuse
- Low Breaking Capacity Fuse
- Rewirable non Kit-Kat type Fuse with Horn Gap
- Rewirable Kit-Kat type Fuse
HT Fuses
- Rewirable non Kit-Kat type Fuse with Horn Gap
- Expulsion or Dropout Fuses
- Cartridge Type HRC Fuses
Surge Diverters or Lightning Arrestors
- Rod Gap Lightning Arresters
- Horn Gap Lightning Arresters
- Gapped Silicon Carbide (SiC) Surge Arresters
- Metal-Oxide Varistor (MOV) or Gapless Surge Arresters
Protective Relays
Types of Protective Relay Mechanisms
Both AC and DC
- Balanced Beam Type Relay
- Electromagnetic Attraction: Armature Type Relay
Only AC
- Electromagnetic Induction: Disc Type Relay
- Electromagnetic Induction: Watthour Meter Type Relay
- Electromagnetic Induction: Cup Type Relay
Types of Protective Relay Operations
Over Current Type Relays
- Instantaneous Over Current Relay
- Definite Minimum Time (Added Delay in Instantaneous Type) Over Current Relay
- Inverse Time Over Current Relay
Inverse Definite Minimum Time Over Current Relay: Quick Operation
\(\begin{array}{l c l} \text{Inverse Current Characteristics} &:& \text{Lower Band of Fault Current Magnitudes}\\ \text{Definite Minimum Time Characteristics} &:& \text{Upper Band of Fault Current Magnitudes}\\ \end{array}\)- Very Inverse Time (Upper Band of Fault Current Magnitudes) Over Current Relay: Quicker Operation
- Extremely Inverse Time (Upper Band of Fault Current Magnitudes) Over Current Relay: Quickest Operation
- Direction Type Relays
Distance Type Relays
- Reactance \((X = \displaystyle\frac{V\sin\theta}{I})\) Relay: Short Transmission Lines, Earth Faults
- Impedance \((Z = \displaystyle\frac{V}{I})\) Relay: Medium Transmission Line
- Admittance \((Y = \displaystyle\frac{I}{V})\) Relay: Long Transmission Lines, Inherently Directional, Least Effected by Surges
RX-Plane
Differential Relay
Current Differential Relay
Biased Differential Current (Merz-Prize) Relay
\(\begin{array}{l c l} \text{Restraining Coils} &:& \text{In Series With the CTs} \\ \text{Operating Coil} &:& \text{In Shunt With the CTs} \\ \end{array}\)
Universal Relay Torque Equation
\(\begin{array}{l c l} \text{Universal Relay Torque Equation} &:& \text{Operating Torque} = \text{Over Current Term} + \text{Over Voltage Term} + \text{Directional Term} - \text{Restraining Term} \\ & & \Rightarrow\tau=K_1I^2+K_2V^2+K_3VI\cos(\theta-\delta)-K_4\\ \text{Over Current Relay} &:& \tau = K_1I^2 - K_4 \\ \text{Over Voltage Relay} &:& \tau = K_2V^2 - K_4 \\ \text{Directional Relay}&:&\tau=K_3VI\cos(\theta-\delta)-K_4\approx K_3VI\cos(\theta-\tau) \Rightarrow\text{Relay Operates When, }\cos(\theta-\delta)> 0 \Rightarrow -90^\circ < (\theta-\delta) < 90^\circ\\ \text{Impedance Relay} &:& \tau=K_1I^2-K_4=K_1I^2-K_2V^2\Rightarrow \text{Relay Operates When }\tau>0\Rightarrow \displaystyle\frac{V}{I}< \sqrt{\displaystyle\frac{K_1}{K_2}}\\ \text{Reactance Relay} &:& \tau=K_1I^2-K_4=K_1I^2-K_3VI\cos(\theta-\delta)\Rightarrow \text{Relay Operates When }\tau>0\Rightarrow\delta=90^\circ\Rightarrow \displaystyle\frac{V\sin\theta}{I}< \sqrt{\displaystyle\frac{K_1}{K_3}}\\ \text{Admittance Relay} &:& \tau=K_3VI\cos(\theta-\delta)-K_4=K_3VI\cos(\theta-\delta)-K_2V^2 \Rightarrow\text{Relay Operates When }\tau>0\Rightarrow\delta=90^\circ\Rightarrow \displaystyle\frac{I}{V}< \sqrt{\displaystyle\frac{K_2}{K_3\cos(\theta-\delta)}}\\ \text{Balanced Beam Type Relay} &:& \tau=K_1I_{operating}^2-k_2I_{restraining}^2 \Rightarrow I_{operating}=\sqrt{\displaystyle\frac{K_2}{K_1}}I_2\\ \text{Attracted Armature Type Relay} &:& \tau=K_1I^2-k_2 ,\quad \tau \approx \propto I_2 \Rightarrow \text{Inverse Current-time Characteristics}\\ & & \text{Operating Force, }K_1I^2 > \text{Restraining Force, } K_2 \Rightarrow \text{Relay Operates} \Rightarrow I_{pickup}\geq\sqrt{\displaystyle\frac{K_2}{K_1}} \\ \text{Induction Disc Type Relay} &:& \tau \propto 2\phi_1\phi_2\sin\theta_{E_1I_{e1}}\sin\theta_{E_1E_2}\\ \text{Watthour Meter Type Induction Relay} &:& \text{Induction Type Energy Meter Principle}\\ \text{Induction Drag Cup Rotor Type Relay} &:& \text{Induction Motor Principle}\\ \end{array}\)Relay Settings
Current Setting = Relay Setting
\( \text{Relay Setting} = \displaystyle\frac{\text{Pickup Current}}{\text{ROC current}} \)Plug Setting (= Operating Current Setting = Pickup Current Setting) Multiplier
\(\begin{array}{l} \text{We want the relay to operate at a specific time than pickup current} \text{PSM} = \displaystyle\frac{\text{CT Secondary Current}}{\text{Pickup Current}} \end{array}\)Time Setting Multiplier
\(\begin{array}{l} \text{We Want Relay to operate fast} \text{TSM}=\displaystyle\frac{\text{Required Time}}{\text{Operating Time when TMS = 1}} \end{array}\)
Circuit Breakers
Arcing
\(\begin{array}{l c l} \text{Occurence} &:& E > \text{Dielectric Strength}\\ \text{Fault Clearing} &:& \text{Fault}\to\text{Relay Open within 5 cycles}\to\text{CB Open}\to\text{Arc Quench within 2 cycles}\\ \text{Arc Interruption} &:& \begin{array}{l c l} \text{High Resistance Method} &:& \text{Arc Lengthening: Zig-Zag Contacts}\\ & & \text{Reducing Cross-Section: Forcing Air}\\ & & \text{Cooling the Arc: Forcing Cool Air}\\ & & \text{Arc Splitter + Forcing Cool Air}\\ \end{array}\\ \text{Current Zero Arc Interruption} &:& \text{Cool Air Blown at I = 0}\\ \text{Active Recovery Voltage} &:& \text{Instantaneous 50Hz voltage across CB contacts at the moment of arc extinction}\\ & & \begin{array}{l} \text{ARV} = K_1 K_2 K_3 V_m \sin\phi \\ K_1 = \text{Factor of Armature Reaction Voltage Reduction Effect}\\ K_2 = \text{First Pole to Clear Factor} =\begin{cases} 1 & \text{grounded fault}\\ 1.5 & \text{ungrounded fault} \end{cases}\\ K_3 = \text{Factor of Power Factor Effect} = \begin{cases} 1 & \text{Phase Voltage}\\ \displaystyle\frac{1}{\sqrt{3}} & \text{Line Voltage}\\ \end{cases}\\ \phi = \text{angle of the fault impedance} \end{array}\\ \text{Prospective Transient Recovery Voltage} &:& \text{Short-lived oscillating non 50 Hz Voltage that is superimposed on the ARV}\\ & & V_{\text{ptrv peak}}=I_{\text{during arc extinguishing}}\sqrt{\displaystyle\frac{L}{C}} \approx ARV\\ & & v_{\text{ptrv}} = V_{\text{prospective peak}}\sin\omega_0t ,\quad \omega_0 = \displaystyle\frac{1}{\sqrt{LC}}\\ \text{Restriking Voltage} &:& \text{alternate name for the TRV, emphasizing its action of trying to re-ignite the arc}\\ & & \text{Its peak is best understood as being approximately twice the ARV}\\ & & v_{\text{restriking}}=\text{ARV}(1 - \cos\omega_0t) \Rightarrow V_{\text{restriking, peak}} = 2 \times ARV \\ & & \text{While the high-frequency oscillatory component of the TRV can be described by}\\ & & \text{the simplified formula \(I\sqrt{\displaystyle\frac{L}{C}}\sin(\omega_0t)\), }\\ & & \text{which depends on the calculated prospective fault current I, }\\ & & \text{the total transient is more accurately and practically modeled by \( \text{ARV}(1 - \cos\omega_0t)\) }\\ & & \text{because its key parameter, the ARV, }\\ & & \text{is derived from the known system voltage, }\\ & & \text{and this superior model clearly demonstrates the critical "voltage doubling" effect, }\\ & & \text{revealing that the peak restriking voltage can reach as high as \(2V_m\) }\\ & & \text{under the most severe fault conditions.}\\ \text{Rate of Rise of Restriking Voltage} &:& \displaystyle\frac{d v_r}{dt}=\displaystyle\frac{\text{ARV}}{\sqrt{LC}}\sin\omega_0t\\ \text{Current Chopping} &:& \text{current is prematurely "chopped" to zero before it reaches its natural zero}\\ & & \Rightarrow \text{TRV}\to\text{Restriking Voltage}\\ & & \text{Observed predominantly in air blast Circuit Breakers} \\ & & \text{Resistance Switching can help mitigate this} \\ \text{Resistance Switching} &:& \text{a low-value resistor with an arcing contact connected in shunt with the CB}\\ & & \text{A small resistor is temporarily inserted across the CB during the opening sequence} \\ & & \text{to critically damp the TRV, thereby reducing both its rate of rise and peak value}\\ & & \begin{cases} r < \displaystyle\frac{1}{2}\sqrt{\displaystyle\frac{L}{C}} & \text{over damped}\\ r = \displaystyle\frac{1}{2}\sqrt{\displaystyle\frac{L}{C}} & \text{critically damped}\\ r > \displaystyle\frac{1}{2}\sqrt{\displaystyle\frac{L}{C}} & \text{under damped}\\ \end{cases}\\ \text{Recovery Voltage} &:& \text{RMS of system voltage (50 Hz) observed across opened CB post complete arc extinction}\\ & & \text{TRV begins, starting from the value of the Active Recovery Voltage and}\\ & & \text{after a few cycles settles as Recovery Voltage}\\ \end{array}\)CB Types
Circuit Breaker Ratings
\(\begin{array}{l c l} \text{Rated Voltage} &:& \text{RMS system voltage that the CB can handle}\\ \text{Rated Current} &:& \text{RMS continuous current that the CB can handle}\\ \text{No. of Operations} &:& \text{life wrt total No. of open and close operations}\\ \text{Symmetrical Breaking Current} &:& & & \text{computed using }X_d^{"} \text{ for Alternator}\\ & & \text{computed using }X_d^{'} \text{ for Motor}\\ & & \begin{cases} 1.0 \times \text{symmetrical Fault Current} & \text{slow operation} \\ 1.4 \times \text{symmetrical Fault Current} & \text{fast operation} \end{cases}\\ \text{Asymmetrical Breaking Current} &:& \text{By considering the DC offset of fault curent}\\ \text{Making (Peak) Current} &:& 2.55 \times \text{Symmetrical Breaking Current}\\ \text{Rated Momentary (RMS) Current} &:& 1.6 \times \text{symmetrical Fault Current}\\ & & \text{Defined with regard to Mechanical Stress}\\ \text{Short time rated Current} &:& \text{Defined with regard to Thermal Stress}\\ \end{array}\)Air Circuit Breakers
- Plain Air Circuit Breakers: With Arc Chutes (Arc Runner + Arc Splitter)
Air Blast Circuit Breaker
- Axial Blast ABCB
- Sliding contact, Axial Blast ABCB
- Vacuum Circuit Breakers
Mineral Oil Circuit Breakers
- Minimum Oil Circuit Breaker: Oil for Arc Quenching
- Bulk Oil Circuit Breaker: Oil for Arc Quenching and Insulation
- Gas \((SF_6)\) Circuit Breakers
- Reclosers: Like Circuit Breakers in Automated distribution networks
- Sectionalizers: Like Isolators in Automated distribution networks
Protection Schemes
System Grounding
Neutral Grounding - Avoids Neutral Shifting, associated arcing grounds
No Grounding
Severe Transient Overvoltages
Solid Grounding
Severe fault currents
\(Z_n = 0\)
\(\Rightarrow \text{used when }\displaystyle\frac{X_0}{X_1} < 3 \Rightarrow \) used for LT Distribution Transformers
Resistance Grounding
gives time to relays to operate but not sufficient
\(Z_n = R_n \Rightarrow \) used for Alternators
Reactance Grounding
Severe Transient Overvoltages due to resonance with line capacitance
\(Z_n = jX_n\)
\(\Rightarrow \text{used when }\displaystyle\frac{X_0}{X_1} > 3 \Rightarrow \) used for overexcited synchronous motors
Resonance (Arc Supressor/ Peterson Coil) Grounding
\(L = \displaystyle\frac{1}{3 \omega^2 C_{ph}}\)
Protection of Transmission Lines
Over Current Protection
- In-Line Cut-Points with Jumpers: LT, 11kV and 33kV Lines
Time Graded Over Current Protection
- Non-Directional Time Graded Over Current Protection System
Current Graded Over Current Protection
Time-Current Graded Over Current Protection
Distance Protection
- 3-Zone Distance Protection
Differential (Pilot Wire) Protection
- Translay Scheme
- Carrier Current Phase Comparison
Protection of Feeder Lines
Protection of Parallel Feeders
\(\begin{array}{l c l} \text{Relays Used} &:& \text{Non Directional Relays on the Source (No Current Reversal) Side}\\ & & \text{Directional Relay on the Load (Current Reversing) Side}\\ \end{array}\)Protection of Ring-Main Feeders
\(\begin{array}{l c l} \text{Relays Used} &:& \text{Non Directional Relays on the Source (No Current Reversal) Side}\\ & & \text{Directional Relay on the Load (Current Reversing) Side}\\ \end{array}\)
Protection of Alternators
Rotor Protection
- Field Ground Fault (Causes Heavy Short Circuit Currents) Protection
- Protection from Unbalanced Loading (Causes Rotor Overheating due to -ve sequence currents)
- Protection against Loss of Excitation (Causes Stator Overheating due to Induction Generator action)
- Overload Protection
- Overspeed Protection
- Overvoltage Protection
- Protection against the failure of Primemover
Stator Protection
- Differential Protection against Internal Faults
- Interturn Fault Protection
- Restricted Earth Fault Protection of Stator Winding
Protection of Transformers
- Protection with Buchholz Relay
- Basic Differential Protection
- Harmonic Restraint Differential Protection (Protects against Inrush Currents)
Power System Economics
Generation Economics
Economic Factors
\(\begin{array}{l c l} \textbf{Connected Load}&:&\text{Continuous Power Rating of all the loads concurrently connected (On or Off doesn't matter)}\\ \textbf{Maximum Demand}&:&\text{max(Sum of Power Ratings of all the loads that are Simultaneously connected)}\\ & &\text{Maximum Demand} \leq \text{Connected Load}\\ \textbf{Minimum Demand}&:&\text{min(Sum of Power Rating of all the loads that are Simultaneously connected)}\\ & &\text{Minimum Demand} < \text{Maximum Demand} \leq \text{Connected Load}\\ \textbf{Average Demand}&:&\displaystyle\frac{\text{Units Generated Over a Period}}{\text{Duration in hours of the Period Under Consideration}}\\ & &\text{Minimum Demand} < \text{Average Demand} < \text{Maximum Demand} \leq \text{Connected Load}\\ \textbf{Load Factor}&:&\displaystyle\frac{\text{Avg. Demand}}{\text{Max. Demand}}\leq1\\ \textbf{Demand Factor}&:&\displaystyle\frac{\text{Maximum Demand}}{\text{Connected Load}} \leq 1\\ \textbf{Diversity Factor}&:&\displaystyle\frac{\sum\text{(Individual Maximum Demands)}}{\text{Overall Maximum Demand of the System}} \leq 1\\ \textbf{Plant Capacity Factor}&:&\displaystyle\frac{\text{Actual Energy Produced}}{\text{Plant Capacity}\times\text{Total Duration (no break)}} = \displaystyle\frac{\text{Average Load}}{\text{Plant Capacity}}\\ \textbf{Plant Use Factor}&:&\displaystyle\frac{\text{Actual Energy Produced}}{\text{Plant Capacity}\times\text{Operating Hours (only working hours)}} = \displaystyle\frac{\text{Actual Units that are Generated}}{\text{Units that could have been Generated}} = \displaystyle\frac{\text{Capacity Factor}}{\text{Duty Ratio}}\leq 1\\ & &\text{How well the running capacity is utilized}\\ \textbf{Plant Utilization Factor}&:&\displaystyle\frac{\text{Maximum Demand}}{\text{Plant Capacity}} \leq 1\\ & &\text{How well the installed capacity is utilized}\\ \textbf{Reserve Capacity}&:&\text{Plant Capacity}-\text{Maximum Demand}\\ & &\textbf{Spinning Reserve: }\text{Synchronized but Under Utilized}\\ & &\textbf{Hot Reserve: }\text{Not Synchronized but Ready}\\ & &\textbf{Cold Reserve: }\text{Installed but Not Ready}\\ \end{array}\)Power Plant Economics
\(\begin{array}{l c l} \textbf{Types of Power Plants}&:&\begin{array}{l c l} \text{Base Load Plants}&:& \text{Coal Thermal}\\ & & \text{Thermonuclear}\\ & & \text{Geothermal Hydel}\\ & & \text{Runoff Hydel}\\ \text{Peak Load Plants}&:& \text{Gas Turbine}\\ & & \text{Diesel Engine}\\ & & \text{Hyel With Reservoir}\\ \text{non-dispatchable Plants}&:& \text{Solar Power Plants}\\ & & \text{Wind Turbine Plants}\\ & & \text{Tidel Power Plants}\\ \end{array}\\ \end{array}\)Economic Load Dispatch
\(\begin{array}{l c l} \textbf{Total Cost of Generation}&:& C_{total}=\begin{matrix}N\\\sum\\i=1\end{matrix}C_i\text{ currency per hour}\\ & & C_i=a_iP_i^2+b_iP_i+c_i\text{ currency per hour}\\ \textbf{Incremental Cost of Unit Generation}&:& IC_i=\displaystyle\frac{dC_i}{dP_i}=2a_iP_i+b_i\text{ currency per MWh}\\ \textbf{Unit Commitment Problem}&:&\text{With No Power Loss: }\begin{matrix}N\\\sum\\i=1\end{matrix}P_i=P_d ,\quad IC_1=IC_2=\cdots=IC_N=\lambda\\ & &\Rightarrow\text{Incremental Cost of Generated Powers are Equal}\\ &:&\text{With Power Loss: Unit incurring least losses takes most load}\\ &&\text{Total Loss: }P_L=\begin{matrix}N\\\sum\\i=1\end{matrix}\begin{matrix}N\\\sum\\j=1\end{matrix}{B_{ij}P_iP_j}\\ & &\text{Constraint: }P_g=P_d+P_L\Rightarrow\begin{matrix}N\\\sum\\i=1\end{matrix}P_i=P_d+P_L,\quad IC_i=\lambda\left[1-\displaystyle\frac{\partial P_L}{\partial P_i}\right]=\displaystyle\frac{\lambda}{L_i},\quad L_i=\text{Penalty Factor}\\ & &\text{Condition: }L_1IC_1=L_2IC_2=\cdots=L_NIC_N=\lambda & &\Rightarrow\text{Incremental Cost of Delivered Powers are Equal}\\ \end{array}\)
Transmission Economics
- Copper Savings with high voltage transmission
- Economical power Factor Correction
Distribution Economics
- Economic Comparison of Distribution Systems
- Most Economic Size of the Conductor
- Tariffs
MathJax
Power Systems
Subscribe to:
Posts (Atom)